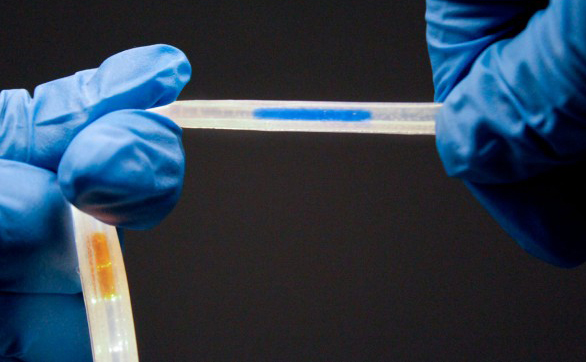
由康奈爾大學開發的低成本觸覺手套,帶有可伸縮的分布式光纖傳感器
康奈爾大學的研究人員開發了一種光纖傳感器,它將低成本的發光二極管(LED)和染料結合在一起,并創造出一種可伸縮的“皮膚”,檢測壓力、彎曲和應變等變形“。 這種傳感器可以用于機器人系統和XR等領域,并為它們提供豐富的觸覺,人類的生存取決于自然界。 一篇名為可伸縮分布式光纖傳感器(可伸縮分布式光纖傳感器)的論文已發表在“科學”雜志上。
SLIMS傳感器能夠檢測壓力、彎曲和應變等變形,并精確定位它們的位置和大小。
該項目基于工程學院機械和航空航天工程副教授RobSheffield(RobShepherd)2016年制造的可伸縮傳感器。其中光通過光纖傳輸,而光電二極管檢測光束強度的變化以確定材料何時變形。 之后,謝菲爾德實驗室開發了各種類似的感官材料,如光學花邊和泡沫。
對于本文介紹的新項目,研究人員借鑒了基于二氧化硅的分布式光纖傳感器。 作為說明,基于二氧化硅的分布式光傳感器可以檢測小波長位移,并可作為識別濕度、溫度和應變變化等各種特性的一種方法。 然而,二氧化硅分離器不兼容靈活和可伸縮的電子產品。 此外,智能柔性系統也帶來了自身的結構性挑戰。
相關論文:可伸縮分布式光纖傳感器研究小組說:“我們知道,柔性材料可以非常復雜的組合變形,同時也會有很多變形。 我們需要一個分離它們的傳感器。 “
團隊解決方案是開發一種可擴展的多模傳感光波導(用于多模態傳感的可拉伸光導;SLIMS)。 該波導包含一對聚氨酯彈性體芯。 體芯是透明的;另一個在多個位置填充吸收染料并連接到LED。。 圖3每個體芯連接一個啞光藍色傳感器芯片,記錄光路的幾何變化。
雙核設計增加了輸出的數量,通過輸出,傳感器可以通過點燃用作空間編碼器的染料來檢測一系列變形,如壓力、彎曲或伸長率。 研究人員還將該技術與一個數學模型結合起來,該模型可以解耦或分離不同的變形,并精確定位它們的位置和大小。
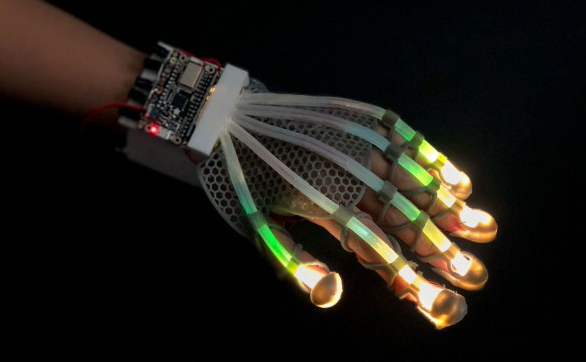
康奈爾大學的有機機器人實驗室設計了一種帶有一系列可拉伸纖維傳感器的3D打印手套,可以用光實時檢測變形。
該技術可應用于可穿戴領域。 研究人員設計了一個3D打印手套,其中每個手指包含一個SLIMS傳感器。 手套由鋰電池供電,并配有藍牙,因此它可以將數據傳輸到一個軟件,可以實時重建手套的運動和變形。
“現在,知覺主要是通過視覺來完成的,”謝菲爾德說。 在現實生活中,我們幾乎永遠不要測量觸摸。 這種皮膚是一種允許我們和機器測量觸覺相互作用的方法,就像我們現在在智能手機上使用相機一樣。 它用視覺來測量觸覺。 以可伸縮的方式實現這一目標是最方便和實用的方法。 “
研究人員還在研究SLIMS傳感器如何增強虛擬現實和增強現實體驗。
謝菲爾德說:“VR和AR沉浸是基于運動捕捉。 觸摸幾乎不存在。 假設你需要一個AR模擬,教你如何修理汽車或更換輪胎,如果你有手套或其他意愿來測量壓力和運動,增強現實可視化可以說‘擰它和停止,這樣你就不會把螺母擰得太緊。‘ 什么也做不了,但這是實現既定目標的一種方式。 “