研究人員找到訓練機器人新方法:碰觸調整運行軌道
導讀美國萊斯大學的研究人員已經研發出一種訓練機器人的新方法,通過輕微推動的方式來訓練它們。他們的這種訓練方式借助的是全新的算法,不僅能夠讓機器人對于人類的碰觸做出反應,還能夠根據推力輸入改變它們的運動軌道

美國萊斯大學的研究人員已經研發出一種訓練機器人的新方法,通過輕微推動的方式來訓練它們。他們的這種訓練方式借助的是全新的算法,不僅能夠讓機器人對于人類的碰觸做出反應,還能夠根據推力輸入改變它們的運動軌道。
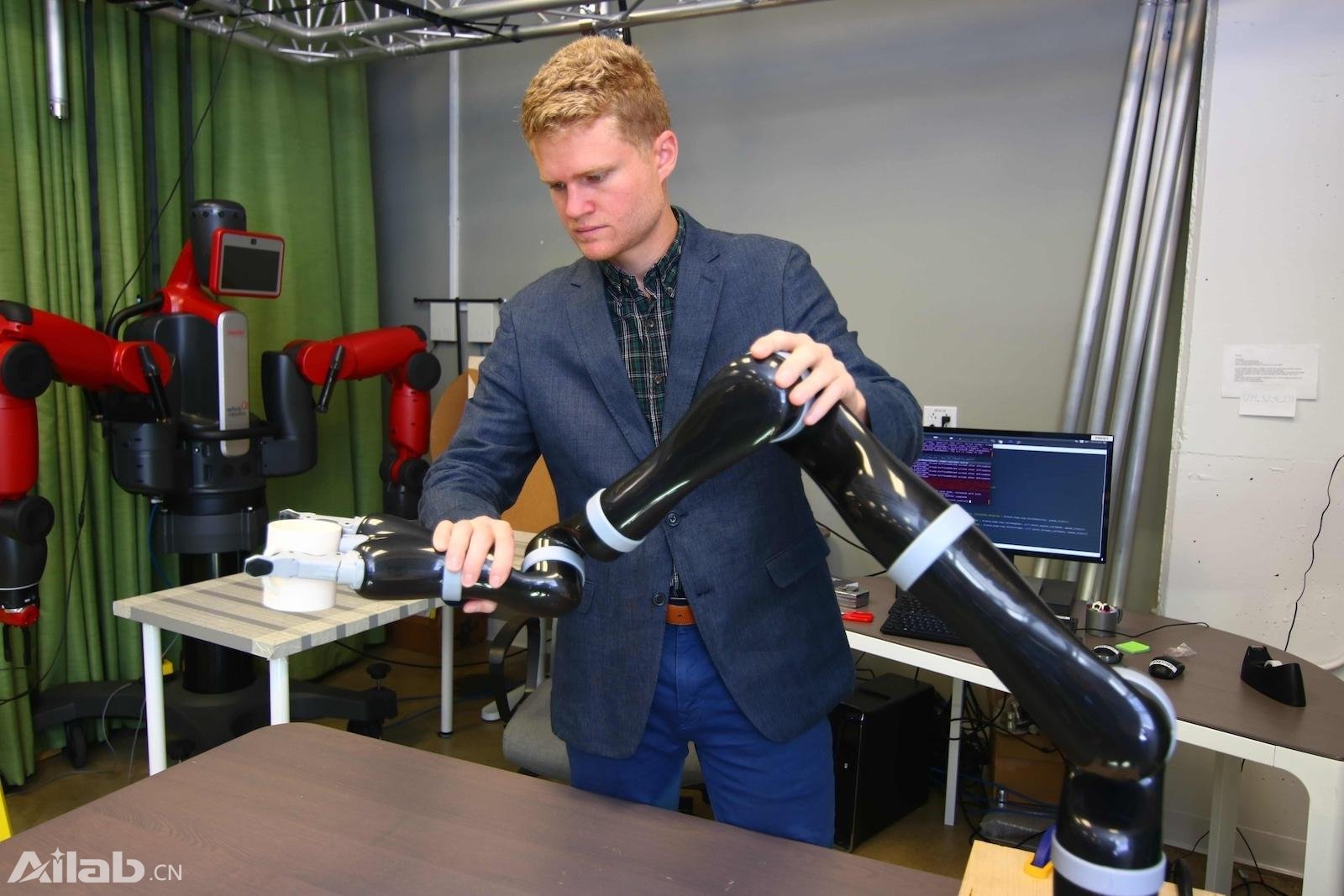
參與這項研究的萊斯大學研究生Dylan Losey在談論這個項目時稱:“機器人會通過設定的計劃或者設定的軌道完成它們肩負的任務。我們引進了一種實時算法,來改變或者修正機器人預定的運行軌道。”
通常來說,當機器人通過程序設定對一個人的物理接觸做出反應時,通常做出的是臨時反應而且不久就會恢復原始軌道。但是萊斯大學團隊研發的算法能夠讓機器人接收到輸入,并且根據接觸實時調整軌道。Losey稱:“機器人在每一次新的輸入檢測后,通過重新修正預定的軌道,能夠形成與人類習慣相匹配的運動軌道。”
研究人員的實驗表明,當機器人處于標準的阻抗模式時,人們只能夠臨時調整機器人的運動軌跡,而且實時改變運動軌跡需要進行不斷的調整。但是當機器人處于學習模式時,一次調整就能夠讓機器人進入一個更加符合要求的全新運行路線。
Losey在一份聲明中稱:“這項研究中的典范轉移并不是將人類視作一種隨機的干擾,機器人會將人類視作一種理性存在,有著相互作用的充分理由而且正試圖傳遞重要的事情。機器人不應當僅僅試圖臨時改變路線,它應當了解發生了什么事情并且更好的完成自己的工作。”(過客)
免責聲明:本文章由會員“劉陽”發布如果文章侵權,請聯系我們處理,本站僅提供信息存儲空間服務如因作品內容、版權和其他問題請于本站聯系