MIT嶄新跑酷呆板人:神似站立“呆板狗”,會耍把戲,夏日發端正式建立

異讀:不日,麻省理工科Sangbae Kim試驗室的接洽職員研制了一款名為 MIT Humanoid的人形呆板人: 網友指摘:發覺像站起來的狗!本來呆板人 好像迷你獵豹(Mini Cheetah)四足呆板人的豎立本子, 不妨實行一致跑酷中的后空翻、180度騰躍等把戲舉措。 犯得著憧憬的是,MI...
不日,麻省理工科Sangbae Kim試驗室的接洽職員研制了一款名為MIT Humanoid的人形呆板人:
網友指摘:發覺像站起來的狗!本來呆板人好像迷你獵豹(Mini Cheetah)四足呆板人的豎立本子,不妨實行一致跑酷中的后空翻、180度騰躍等把戲舉措。

犯得著憧憬的是,MIT Humanoid將至今年7月在Humanoids 2020聚會上海展覽中心出。
一個動靜的、會把戲的人形呆板人
往日很長一段功夫此后,科學家們執著于開拓出一個能在平整的外表下行走而不會摔倒的雙足呆板人。此刻,跟著Agility Robotics和Boston Dynamics等公司的全力,咱們以至不妨憧憬雙足呆板人在某些動靜工作上能到達或勝過生人的展現。
那下一步呢?生人在超過,呆板人同樣。
雙足呆板人的下一歌目的猶如是要沖破生人扮演的極限,也即是把戲。咱們領會,IHMC從來在開拓一款名為Nadia的童子巨細的把戲人形呆板人,此刻,MIT的Sangbae Kim試驗室也介入了進入,接洽職員表白,她們正在接洽新式把戲呆板人。
▲呆板人Nadia
麻省理工科Sangbae Kim試驗室研制全力于研制足式呆板人,帶來了很多具備劃期間意旨的呆板人安排,比方四足獵豹呆板人和仿人呆板人HERMES等。在韓國的Naver試驗室幫助和扶助下,她們從來在完備迷你獵豹這款呆板人,讓呆板人實行少許動靜舉措,比方步態探究和少許低調的四足把戲。
▲迷你獵豹呆板人
神似站立“呆板狗”,腿部安排是亮點
在邇來公布在arXiv上的一篇輿論中,Matthew Chignoli、Donghyun Kim、Elijah Stanger-Jones和Sangbae Kim刻畫了“一種新的人形呆板人,一種可感知實行器的疏通籌備器,和降落遏制器,動作用來人形呆板人高動靜疏通遏制的適用體例安排的一局部”。
先來看硬件情景。麻省理工科學院的Matt Chignoli(奇尼奧利)說,這款呆板人的表面有點像迷你獵豹呆板人的豎立版。固然MIT Humanoid的軀干和手臂特殊逼近迷你獵豹呆板人,然而它的腿部是嶄新安排,沿用了從新安排的實行器,具備更高的功率和更好的扭矩密度。
奇尼奧利表白:“腿部安排的重要中心是,實行生人步輦兒和跑步時的那種光滑動靜的‘腳后跟到腳趾’舉措,同聲維持低彈性以與大地交戰舉行通順的交互。”“動靜腳踝舉措在類人呆板丹田很罕見。咱們蓄意開拓出不妨抄襲生人腿部舉措的興盛、低彈性和宏大的腿部。”
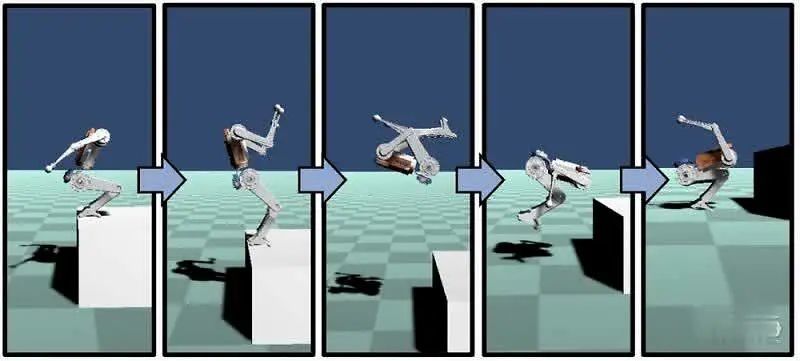
▲MIT Humanoid實行從0.4米的平臺長進行后空翻的舉措
奇尼奧利提出:“安排戰略很要害,由于暫時人形呆板人范圍有兩大主宰目標,辨別是液壓啟動呆板人和帶有串聯彈性制動器呆板人。跟著咱們連接矯正本質感知實行器的本能,正如咱們在這項處事中所做的一律,咱們的目的是表明咱們這種高扭矩密度、高帶寬力遏制平靜沖報復本領的特殊拉攏對于任何足式呆板人(囊括人形呆板人)實行莫大動靜疏通是最好的。”
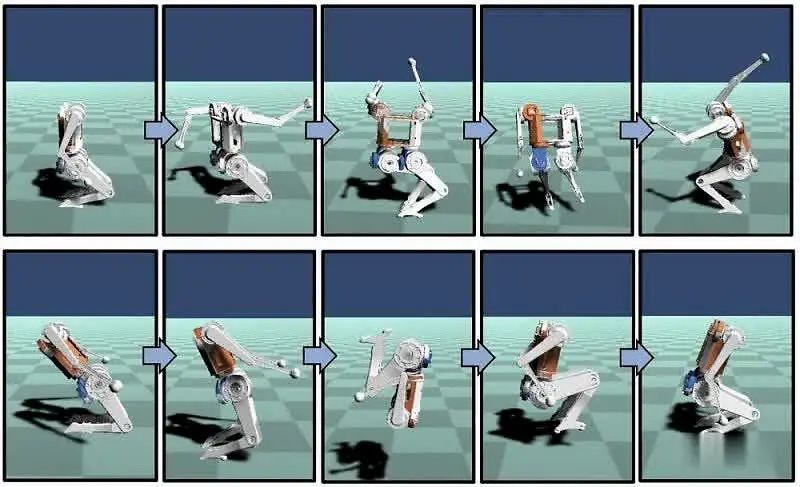
▲MIT Humanoid實行180°回旋騰躍(上)和站立前空翻(下)舉措
從模仿到實際,生存不決定性
“這不過在模仿,你不妨在模仿中得就任何貨色”如許的指摘很平常。然而麻省理工科上面盡大概的加入了洪量處事來實行精確模仿。更加是,她們對呆板人執動作態疏通時所遭到的精細的物理牽制情景舉行建立模型,承諾籌備職員商量那些牽制,并(蓄意)實行與模仿一律透徹配合的疏通。
“當提出呆板人的物理本領時,咱們在模仿中展現的任何貨色都該當在呆板人上可行。”奇尼奧利說。“在咱們的模仿中,建有呆板人實行器和干電池的精細模子,而且那些模子仍舊經過了試驗考證,固然這種精細模子并不常常在呆板人動靜模仿中展示。”然而模仿究竟仍舊模仿,不管建立模型多棒,變換到本質都很辣手,更加是在實行莫大動靜的疏通時。

“縱然咱們斷定咱們的模仿器不妨以高保真度透徹模仿咱們呆板人的物理本領,然而當咱們安置把預期要實行的把戲舉措安置到硬件上時,咱們的模仿器在某些上面仍舊有不決定。”奇尼奧利證明說:“咱們暫時的重要艱巨是狀況估量,咱們從來參考與無人駕駛飛機狀況估量關系的接洽,無人駕駛飛機狀況估量接洽中運用到了視覺歷程計。然而即使沒有一個組建好的呆板人來嘗試那些新的估量戰略,就很難確定是否實行從模仿到如實的變化。”
真實要害的奉獻是框架而不是呆板人自己
MIT Humanoid的安排仍舊實行,安置在夏日創造,最后目的是實行MIT Humanoid在充溢挑撥性的地勢長進行跑酷疏通。人們很簡單潛心于呆板人的所有把戲扮演和跑酷觀點,不妨憧憬少許精粹視頻。
然而按照奇尼奧利的講法,這項接洽的真實要害奉獻在乎安排框架而不是呆板人自己:“咱們用袖珍人形呆板人展現把戲舉措的手段和本質的把戲扮演無干,而是更多實行那些動抵制于咱們的硬件以及遏制框架表示著什么。就呆板人本領而言,那些疏通很要害,由于咱們表明,起碼在模仿中,咱們不妨運用實足各別的啟動計劃(辨別是本質感觸式電磁電機與液制止動器)來復制波士頓能源公司Atlas呆板人的動靜舉措。
當人們商量怎樣安排下一代的動靜人形呆板人時,考證本質感觸器不妨保持低板滯阻抗和高帶寬扭矩遏制的上風同聲,到達實行該類疏通所需的扭矩密度,就特殊要害。其余,把戲舉措展現了咱們的‘實行感知’疏通籌備器天生可行的疏通籌備的本領,那些安排擴充了咱們呆板人所能實行工作的邊境。”

在將來,麻省理工科學院的仿人呆板人不妨表明在實行普遍的攙雜工作上面具備很高的功效。同聲,接洽職員安置在實際寰球的場景中嘗試她們的安排、疏通籌備器和遏制算法。
參考材料:
https://techxplore.com/news/2021-05-mit-humanoid-robot-dynamic-robotic.html
https://spectrum.ieee.org/automaton/robotics/humanoids/mit-dynamic-acrobatic-humanoid-robot
麻省理工科新接洽:呆板人挑撥把戲,神似站立“呆板狗”_鳳凰網 (ifeng.com)
MIT正在研制嶄新跑酷呆板人,腿部安排是亮點,夏日發端正式建立|mit|實行器|仿盼望器人|人形_網易訂閱 (163.com)
END
看累了嗎?戳一下“在看”扶助咱們吧!