工業機器人的基礎架構和你心里所想有出入嗎?

前言
機器人不僅可以服務于消費者的日常起居,還可以在工業領域協助企業共同工作。本期主要是針對工業機器人的結果展開話題的!
機器人不僅可以服務于消費者的日常起居,還可以在工業領域協助企業共同工作。本期主要是針對工業機器人的結果展開話題的!機械系統通常包括機座、立柱、腰關節、臂關節、腕關節和手爪等,構成一個多自由度的機械系統。
如果工業機器人的機身具備行走機構便構成行走機器人;如果機身不具備行走及腰轉機構,則構成單機器人臂。手臂一般由上臂、下臂和手腕組成。末端執行器是直接裝在手腕上的一個重要部件,它可以是兩手指或多手指的手爪,也可以是噴漆槍、焊槍等作業工具。
主體結構的基本形式
工業機器人主體結構中各個關節運動副和連桿構件組成了不同的坐標形式。常見的主體結構形式有:直角坐標形式、圓柱坐標形式、球面坐標形式、關節坐標形式。
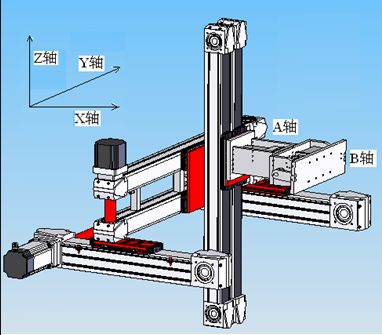
1. 直角坐標形式機器人
如下圖所示,這一類機器人手部空間的位置變化是通過沿 著三個相互垂直的軸線移動來實現的,這類形式的機器人常應用 于生產設備的上下料和高精度的裝配和檢測作業。一般直角坐標 形式機器人的手臂可垂直上下移動軸方向),并可以沿著滑架和橫梁上的導軌行水平二維平面的移動。顯 然直角坐標形式機器人結構具有3個自由度。
直角坐標系機器人結構簡圖
直角坐標形式機器人具有如下優點:
結構簡單。
編程容易,在尤,r,z三個方向的運動沒有耦合,便 于控制系統的設計。
直線運動速度快,定位精度高,避障性能較好。
同時由于該類型機器人必須采用導軌,也有如下缺點和問題:
(1)動作范圍小,靈活性較差。
(2)導軌結構較復雜,維護比較困難,導軌暴露面大,不如轉動關節密封性好。
(3)結構尺寸較大,占地面積較大。
(4)移動部分慣量較大,增加了對驅動性能的要求。
2.圓柱坐標形式機器人
圓柱坐標機器人通過兩個移動和一個轉動來實現手部空間位置的改變,其主體具有3個自由度:腰部轉動、升降運動,手臂伸縮運動。

圓柱坐標系機器人結構簡圖
圓柱坐標形式機器人主要有如下優點:
控制精度較高,控制較簡單,結構緊湊。
對比直角坐標形式,在垂直和徑向的兩個往復運動可以采用伸縮套筒式結構,在腰 部轉動時可以把手臂縮回去,從而減小了轉動慣量,改善了力學負載。
圓柱坐標形式機器人的主要缺點是:
由于機身結構的原因,手臂不能到達底部,減小了 機器人的工作范圍,同時結構也較龐大。
3.球面坐標形式機器人
機械手能夠做里外伸縮移動,在垂直平面內擺動已經繞底座在水平面內移動,因為這種機器人的工作空間形成球面的一部分,故稱為球面坐標機器人,其設計和控制系統比較復雜,美國Unimation公司的UnimaTIon系列機器人就是球面坐標形式的代表,其手臂伸縮采用液壓驅動的移動關節,繞垂直和水平軸線的轉動也采用了液壓伺服系統。
球面坐標形式機器人的特點是:
占地面積較小,結構緊湊,位置精度尚可,但避障性能較差,存在平衡問題。
4.關節坐標形式機器人
這種類型的機器人主要由底座、大臂和小臂組成。大臂和小臂間的轉動關節稱為肘關節,大臂和底座間的轉動關節稱為肩關節。底座可以繞垂直軸線轉動,稱為腰關節。它是一種廣泛應用的擬人化機器人。
關節坐標形式機器人主要有以下優點:
(1)結構緊湊,占地面積校
(2)靈活性好,手部到達位置好,具有較好的避障性能。
(3)沒有移動關節,關節密封性能好,摩擦小,慣量校
(4)關節驅動力小,能耗較低。
關節坐標形式機器人的缺點有:
(1)運動過程中存在平衡問題,控制存在耦合。
(2)當大臂和小臂舒展開時,機器人結構剛度較低。
主體結構的設計
工業機器人主體結構及其機身設計時需要注意,作為整個機器人支撐的主體應該具有足夠大的剛度、強度和穩定性;主體結構自身應該保證運動靈活,避免在結構設計上出現自鎖卡死的問題,選擇合適的驅動方式,結構布置合理。
此外機器人主體結構材料的選擇方面,應從機器人的性能要求和滿足機器人的設計和制作要求出發。同普通機械結構的設計類似,用來支撐、連接、固定機器人的各部分的材料應該是結構性的材料。
另外考慮到機器人整體也是運動的,其材料質量應輕。精密機器人對材料的剛度和振動方面均有要求,控制振動也需要從減輕重量和抑制振動兩方面考慮,也與材料自身的抗振性緊密相關。正確選用結構件材料可降低機器人的成本價格,更適應機器人的高速化、高載荷化及高精度化,以及靜力學及動力學的特性要求。
免責聲明
文章來源:百度資訊
凡資訊來源注明為其他媒體來源的信息,均為轉載自其他媒體,并不代表本網贊同其觀點,也不代表本網對其真實性負責,轉載請聯系原出處。您若對該文章內容有任何疑問或質疑,請立即與后臺小編聯系,平臺將迅速給您回應并做處理。注明本公司原創內容,轉載請與我們聯系哦!