內地大學磁球機器人第一屆世界頂尖學術會議最佳論文獎

導讀:提起呆板人,很多人城市直觀地設想到板滯狀的人形,大概是像波士頓動力的呆板狗普遍的四足仿生呆板人。它們模仿人民代表大會概其余動物的肌肉和骨骼構造。本來呆板人的范圍遠遠不只于此,影戲《超能陸戰隊》就展現了其余兩種對于呆板人的設想,一個是有柔嫩皮膚,又...

提起呆板人,很多人城市直觀地設想到板滯狀的人形,大概是像波士頓動力的呆板狗普遍的四足仿生呆板人。它們模仿人民代表大會概其余動物的肌肉和骨骼構造。本來“呆板人”的范圍遠遠不只于此,影戲《超能陸戰隊》就展現了其余兩種對于“呆板人”的設想,一個是有柔嫩皮膚,又會積極撫慰人的“表露”;一個是由多數微磁單位構成、大肆變形的呆板人。
這品種型的呆板人叫做模塊化自重構呆板人(Modularselfreconfigurable robot, MSRR)。這種呆板人屬于一種特出的多呆板人體例,由洪量同構的呆板人模塊構成。比擬于樣式固定的呆板人,這類呆板人功效百般、可擴充性強、也具備更強的魯棒性。
“《超能陸戰隊》內里這個例子,我感觸是MSRR 最后蓄意做到的,有點像生物的細胞,幾百億以至幾千億個小細胞動作單位,構成了一個宏大并且攙雜的人命共通體,最后這個共通體不妨按照需要自在地變換形勢及功效。”香港華文大學(深圳)理工科學院的梁冠琪接收采訪時說。暫時,他在該校的呆板人與人為智能試驗室攻讀博士學位二,導師是試驗室實行副主任林天麟熏染。
前不久,梁冠琪動作第一作家的論文物博物得了IEEE智能呆板人與體例國際聚集(IROS)的呆板人機構安排(Robot Mechanism and Design)最好論文獎。獲獎的是一種叫做FreeBOT的球形呆板人體例,它們之間不妨經過磁性自在地貫穿在所有。
呆板人機構安排最好論文獎為本年新增獎項,梁冠琪地方的共青團和少先隊所以成為首屆獲獎者。而除了這篇論文獲獎,林天麟共青團和少先隊此次有三篇對于MSRR的論文都被IROS接受。其余兩篇論文的辨別接洽了體例中單個模塊的相對定位,以及動作所有體例的呆板人趕快重構算法。
貫穿不受控制的磁性球體呆板人
MSRR呆板人與罕見的呆板人在樣式上有很大的分辨,在安排思緒上也不同。人形呆板人、四足呆板人、大概無人駕駛飛機,這些呆板人樣式固定,在安排時會談商討量從某些簡直功效動身。
而MSRR呆板人則是其余一種思緒,不針對特定的工作而安排。科學家們蓄意它不妨跟著工作和情景的不同,趕快變換自己的構型,進而實行更一致的功效。這種思緒遭到了群居生物的開辟。群居動物拉攏在所有不妨實行遠超過個別本領的攙雜工作。比方螞蟻,在遇到個別難以經過的地形時,不妨彼此貫串身材,構成橋梁等攙雜構造。
所以,MSRR呆板人安排的一個重心題目是模塊間的貫穿機構。現有的MSRR體例的貫穿辦法都存在某些牽制,兩個模塊間須要透徹地對準本領貫穿,而且存在特定的貫穿面,一致航天器的對接辦法。
梁冠琪引薦,在推敲FreeBOT的安排時,林熏染蓄意不妨盡大概地減少對貫穿的控制,以至做到能趕快及大肆進行貫穿的功效。實際生存中的巴克球這種才華玩物也給了他們開辟。巴克球是一個帶磁性的小球,第一次全國代表大會群巴克球能自在拉攏成形形色色的形勢。
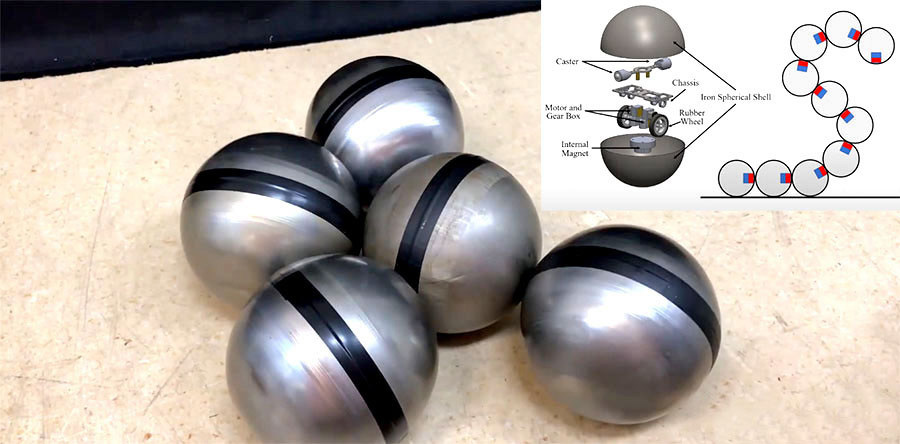
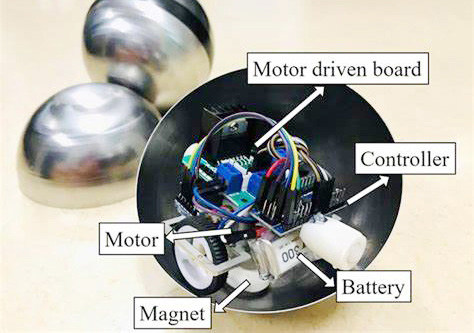
FreeBOT也是運用磁力與另一個FreeBOT表面就任意一點進行貫穿,解脫了保守MSRR 須要在特定貫穿點進行貫穿的牽制。這一本能是何如實行的?FreeBOT的構造重要分為兩限制:外部一個鐵磁性球殼,以及里面包車型的士啟動器。里面啟動器上有輪子、馬達、磁鐵等部件。
啟動器像一個小車帶著磁鐵在球殼里面疏通,進而變換FreeBOT的中心傳播及磁效率力的目的,一方面付與FreeBOT獨力挪動的本領,另一方面能讓FreeBOT經過磁力在另一個FreeBOT上自在往來。
當啟動器鄰近兩個圓球的外表交戰點時,傳導到表面包車型的士磁性就不妨讓兩個FreeBOT貫穿在所有。貫穿大概斷開貫穿只須要0.5秒的功夫。如許,里面包車型的士啟動器,既實行了對單個FreeBOT疏通的遏制,同時也不妨遏制球外部的磁性傳導。
依附里面包車型的士宏大磁體,單個的FreeBOT就不妨爬上有磁性的陡坡以至墻面。論文還展現了兩個FreeBOT協調實行少許超過個別本領的工作。
磁鐵在啟動器的底部,它就會對外殼一直保護磁力,讓鄰近它的球殼表面具備磁性;同時,磁鐵與球殼的內面又非直接交戰,而是橡膠輪與球殼內面交戰,如許不妨經過遏制橡膠輪,讓磁鐵在球殼里面回旋目的。要實行自在趕快的貫穿,磁鐵的選型以及其隔絕外部鐵殼的隔絕須要恰到長處,梁冠琪引薦,考查中央體驗過很反復波折。
磁性會跟著隔絕而衰減,所以要盡大概鄰近球殼內壁,但是即使太近,也會議及展覽現題目。“太近的話,因為磁鐵的吸力很大,就直接把小車吸在了球殼上,而且會啟發小車形變,就沒有方法讓小車在球殼內自在疏通。”梁冠琪回顧他在試驗中獲得的體味。獲獎論文所展現的是第一代的版本,梁冠琪引薦,他們暫時正在接洽構造安排上的細節優化。
林天麟共青團和少先隊 此次三篇作品當選IROS
林天麟所引導的三篇對于多呆板人體例的論文同時當選IROS,展示了共青團和少先隊在這一目的上的探究。林天麟熏染是IEEE高檔會員,師從華夏工程院院士徐揚生熏染。他在呆板人和自動化體例的研究開發方面具有充分的功效,大限制論文均公布于呆板人和自動化范圍的頂級國際期刊及國際聚集,如T-RO,JFR,T-MECH,ICRA和IROS等。除了模塊化呆板人體例,軟體呆板人、多呆板人體例、人機協調都是共青團和少先隊的接洽目的。
他也是深圳市人為智能與呆板人接洽院(AIRS)的成員。這個接洽院依靠于香港華文大學(深圳),是深圳市當局創造的十大基礎接洽機構之一。
此次當選IROS的其余兩篇論文,辨別接洽了體例中單個呆板人的相對定位,以及動作所有體例的呆板人趕快重構算法。體例中單個呆板人的相對定位是指,體例中文大學肆一部呆板人及時決定出其余呆板人相對于自己的場所和方位。這是一個由多個呆板人構成的體例平常處事的基礎。
所有體例的趕快重構算規則是扶助一個呆板人體例辨別情景而且變換完全構型。比方多個FreeBOT構成的呆板人體例,須要夠按照路面情景的不同,貫串安排部隊,貫穿進步。
針對這個題目,一篇論文進行了算法安排。在仿如實驗中,一個FreeBOT體例不妨趕快符合攙雜的表面,經過“變幻隊形”上任階,翻越妨礙物。
用MSRR進行非構造化情景探究
《超能陸戰隊》中,小宏安排的微磁呆板人體例不妨構成一只宏大的手掌,并做出招手的模樣。如許一個辦法看起來大略,在安排上卻特出艱巨。“這訴訟要求最底下的模塊,不妨供給如許一個自在度,這邊面就有物理學上的瓶頸。”梁冠琪引薦。
這是深沉的目的。但是短期內,科學家們蓄意MSRR不妨扶助人類進行非構造的情景探究,更加是地動、火警等情景中實行探究、越障、抓取等工作。如在災后的廢墟現常此刻也有少許探勘情景的呆板人,比方蛇形呆板人不妨探究少許渺小的缺陷,但是遇到斷橋大概高樓如許的構造,疏通保持會受限,而一個MSRR呆板人就不妨更精巧地符合百般地形。
假如災后現場有一個很小的地道,而生還者在地道的另一頭,這功夫板滯臂的功效無法發揮開,MSRR就不妨用小模塊的辦法經過地道,到另一端再從新構型,而且實行板滯臂的功效。
要實行如許的功效,就須要比擬大范圍的體例。梁冠琪引薦,梁冠琪引薦,暫時FreeBOT不過考證了一種能實行趕快并大肆貫穿的機構安排。
而將來,共青團和少先隊蓄意不妨在呆板人上安置傳感器及遏制器,使其成為傳播式的自決體例。其他,當更多的FreeBOT產生一個體例的功夫,就須要定位和疏通籌備的算法引導其挪動。更大的體例也對傳感器安置、鞏固FreeBOT的板滯本能、更長功夫的續航提出了更高的訴訟要求。
FreeBOT是梁冠琪科學研究道路上的第一個大作,在導師手把手的引導下,他發端漸漸領會何如去安排呆板人。他會去提防身邊百般會動的貨色,查看他們是為什么能動,比方阛阓里罕見的鼓風機充氣玩偶,會遭到氣流的感化從來動搖,也有安排成呆板人的后勁。“別致呆板人的安排,無非是經過少許別致的構造和本領為呆板人供給自在度。而這些自在度是何如來的,大天然和凡是生存常常會報告咱們少許風趣的答案。”