基于BLS的微機器人精確柔性軌跡跟蹤新方法!
發布者:金楠
 2023-07-10 03:44:05
2023-07-10 03:44:05
2023-07-10 03:44:05
導讀導讀微型磁性螺旋機器人。 由于這些機器人可以在狹窄的環境中靈活移動,因此在靶向治療中,具有微型尺寸和在低雷諾數液體中游泳能力的磁性微型機器人的使用前景廣闊。 然而,由于期望的復雜軌跡的非線性和多樣性

導讀:微型磁性螺旋機器人。 由于這些機器人可以在狹窄的環境中靈活移動,因此在靶向治療中,具有微型尺寸和在低雷諾數液體中游泳能力的磁性微型機器人的使用前景廣闊。 然而,由于期望的復雜軌跡的非線性和多樣性的影響,在不頻繁調整控制器的情況下保證微機器人...
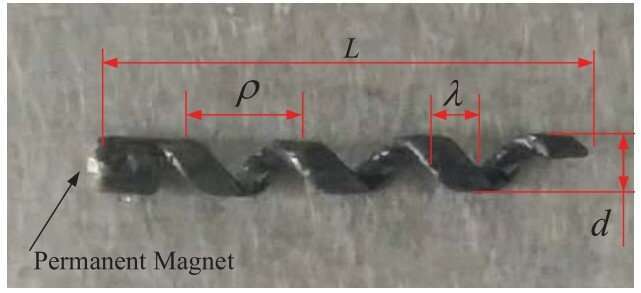
微型磁性螺旋機器人。
由于這些機器人可以在狹窄的環境中靈活移動,因此在靶向治療中,具有微型尺寸和在低雷諾數液體中游泳能力的磁性微型機器人的使用前景廣闊。
然而,由于期望的復雜軌跡的非線性和多樣性的影響,在不頻繁調整控制器的情況下保證微機器人的跟蹤精度是一個挑戰。
近日,中國科學院深圳先進技術研究所徐勝、徐甜甜等領導的研究團隊開發了一種基于廣義學習系統(BLS)的微機器人精確柔性軌跡跟蹤新方法。
這項研究發表在11月1日的《IEEE控制論匯》上。
與傳統的深度學習方法相比,bls具有結構簡單靈活的特點,可以達到較好的準確率。
研究小組開發了基于BLS的學習型微機器人伺服控制算法,并將李雅普諾夫理論與復雜學習方法相結合,推導出控制器參數約束。
他們還開發了一種基于bls的控制器訓練算法,使用多個期望跟蹤軌跡作為演示,并通過訓練算法獲得控制器參數。
仿真和實驗結果表明,基于bls的方法訓練速度快,僅需6秒左右。
訓練后的基于bls的控制器可以更好地跟蹤不同形狀和速度的軌跡,且由于其較強的泛化能力,不需要進行參數調整。此外,由于采用了BLS方法,當需要新的演示時,節點的數量可以靈活調整。
免責聲明:本文章由會員“金楠”發布如果文章侵權,請聯系我們處理,本站僅提供信息存儲空間服務如因作品內容、版權和其他問題請于本站聯系