人工智能在機器人仿生模擬方向的應用

引言:長期以來,研究人員對機器人與人類之間的互動很感興趣,因此創造了 EVA這一新型自主機器人。其面部柔軟而富有表情,可根據人類的表情做出反應。
盡管我們的面部表情在建立信任中起著巨大的作用,但大多數功能機器人仍會像職業撲克玩家一樣面無表情。隨著在機器人和人類需要密切合作的地方越來越多,從療養院到倉庫、工廠,對反應更快、面部逼真的機器人的需求越來越迫切。

哥倫比亞工程公司創意機器實驗室的研究人員長期以來一直對機器人與人類之間的互動感興趣,他們已經花了五年時間來創造 EVA這一新型自主機器人,其面部柔軟而富有表情,可根據周圍人類的表情做出回應。該研究于 2021 年 5 月 30 日在 ICRA 會議上發表,機器人藍圖在 Hardware-X(2021 年 4 月)上開源。
研究團隊教授利普森曾在雜貨店觀察到戴著名牌的補貨機器人他戴著一頂舒適的手工編織帽。人們似乎通過給他們眼睛、身份或名字來使他們的機器人同事人性化。那如果眼睛和衣服都有效,為什么不制造一個擁有表情和反應靈敏的人臉機器人呢?雖然這聽起來很簡單,但對于機器人專家來說,創建令人信服的機器人面孔一直是一項艱巨的挑戰。幾十年來,機器人身體部位一直由金屬或硬塑料制成,這些材料太硬,無法像人體組織那樣流動和移動。機器人硬件也同樣粗糙且難以使用電路、傳感器和電機笨重、耗電且體積龐大。
該項目的第一階段是幾年前在利普森的實驗室開始的,當時本科生Zanwar Faraj帶領一群學生構建了機器人的物理“機器”。他們將 EVA 構建為一個無實體的半身像,EVA 可以通過使用人造“肌肉”(即電纜和馬達)拉動 EVA 臉上的錨點來表達憤怒、厭惡、恐懼、喜悅、悲傷和驚訝六種基本情緒以及一系列更細微的情緒,仿生模仿附著在人臉皮膚和骨骼不同點上的 42 多塊微小肌肉的運動。
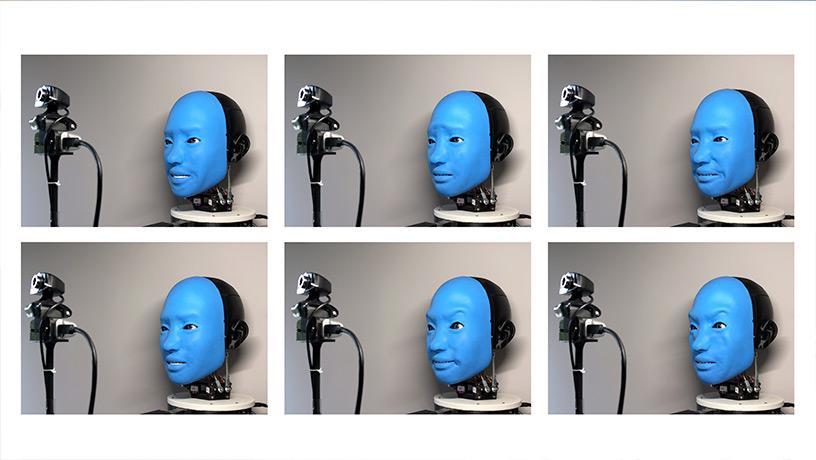
創造 EVA 的最大挑戰是設計一個足夠緊湊的系統,以適應人類頭骨的范圍,同時仍然具有足夠的功能以產生各種面部表情。為了克服這一挑戰,該團隊依靠 3D 打印來制造形狀復雜的零件,這些零件與 EVA 的頭骨無縫高效地集成在一起。經過數周的拉扯電纜讓 EVA 微笑、皺眉或看起來很沮喪后,該團隊注意到 EVA 的藍色、無實體的面孔可能會引起實驗室伙伴的情緒反應。“有一天,當 EVA 突然給我一個大大的、友好的微笑時,我正忙著自己的事,”利普森回憶道。“我知道這純粹是機械性的,但我發現自己條件反射地回以微笑。”
一旦團隊對 EVA 的“機制”感到滿意,他們就開始著手解決該項目的第二個主要階段:對指導 EVA 面部動作的人工智能進行編程。雖然栩栩如生的電子動畫機器人多年來一直在主題公園和電影制片廠場景中應用,但利普森的團隊取得了兩項技術進步。EVA 使用深度學習人工智能來“閱讀”并學習周圍人的表情,然后讓機器人鏡像表現。EVA 模仿各種不同人類面部表情的能力是通過觀看自己的視頻反復試驗來學習的。領導該項目軟件階段的 Lipson 博士生 Boyuan Chen 很快意識到,EVA 的面部運動過程過于復雜,無法由預定義的規則集控制。為了應對這一挑戰,學生們使用多個深度學習神經網絡創建了 EVA 的大腦。機器人的大腦需要掌握兩種能力:首先,學會使用自己復雜的機械肌肉系統來生成任何特定的面部表情;其次,通過“閱讀”人類的面孔來知道要制作哪些面孔。

為了教 EVA 自己的臉是什么樣子,團隊們拍攝出EVA自己制作一系列隨機面孔的鏡頭。然后,就像人類在 Zoom 上觀看自己一樣,EVA 的內部神經網絡學會了將肌肉運動與自己臉部的視頻片段配對。現在 EVA 對自己的面部如何工作(稱為“自我形象”)有了初步的了解,它使用第二個網絡將自己的自我形象與其攝像機拍攝的人臉圖像進行匹配。經過多次改進和迭代,EVA獲得了從相機讀取人臉手勢并通過鏡像人的面部表情做出響應的能力。
研究人員指出,EVA 是一項實驗室實驗,與僅靠模仿人類使用面部表情進行交流的復雜方式相去甚遠。但這種技術有一天可能會在現實世界中產生有益的應用。例如,能夠對各種人體語言做出反應的機器人將在工作場所、醫院、學校和家庭中發揮作用。
本文由升哲科技編譯,轉載請注明來自sensoro.com