當機器人安裝在大腦和小腦上時會發生什么?

導讀:[email protected],大多數移動機器人還處于非常早期的階段,對他們來說,智能地做一些工作仍然是一個嚴峻的挑戰。 如何為機器人設計一種類似于人腦的大腦結構來提高其智力,是近年來研究的熱點。 實際上,課...


學術頭條
目前,大多數移動機器人的功能還處于非常早期的階段,智能地做一些工作仍然是一個嚴峻的挑戰。 如何為機器人設計一種相似的人腦結構來提高其智能,一直是近年來的研究熱點。
然而,在第一次提出這一想法時,相應的機器人技術尚未實現。
最近發表在“科學機器人”雜志上的一篇論文詳細描述了一個混合系統,它將控制運動的模擬電路與控制感知和決策的數字電路結合起來,不僅顯著降低了能耗,而且提高了機器精度和計算效率。
混合系統的關鍵存儲器設備
我們知道,如果機器人想在動態環境中控制身體,它需要有很強的處理能力,這既需要很大的芯片空間,也需要足夠的動力來維持它的壽命。 同時,在實時控制中,機器人需要快速獲取和處理感官信息,從而對不斷變化的環境條件做出快速反應。
傳統上,機器人的控制能力主要依靠純數字方法,但這種數字系統會導致高延遲和高功耗。
在這項工作中,為了使機器人適應環境的變化,研究人員使用記憶器的可重構(可編程電導率)(即記憶裝置和電阻裝置的組合)來實現機器人的運動控制。 他們使用記憶器來建立一個模擬電路,在這個電路中,一個算法集成了來自加速度計和來自機器人的陀螺儀的數據。
結果表明,該方法顯著減少了計算時間,使機器人控制具有更高的精度和速度。
此外,可編程電阻還有一個額外的好處,即允許計算和記憶處于相同的物理位置(這種方法類似于人腦處理信息的方法),從而提高了控制系統的計算效率。 此外,它幾乎不受器件變化的影響,而且具有較高的損耗電阻和較長的壽命。
研究人員在實驗中只使用了兩個記憶器裝置。 第一記憶器用于模擬濾波器去除導致機器人不穩定的傳感器信號噪聲,然后運動控制器接收濾波器波后的傳感器信號和第二記憶器來控制機器人。
為了優化第二記憶器的電導率,同時使系統能夠立即響應未知和不可預測的情況,研究人員基于隨機搜索算法通過自適應學習過程。 實現了一種無模型優化系統參數的方法。
由于濾波器和控制功能的計算是在模擬域中進行的,因此不需要額外的模數轉換器或數模轉換器,大大降低了系統的功耗,減少了處理時間和整個電路面積和成本。 同時,由于量化噪聲的降低,精度得到了提高。 此外,這些函數背后的計算不會發生在系統的數字域中,從而降低了其計算負載。
混合系統的局限性和前景
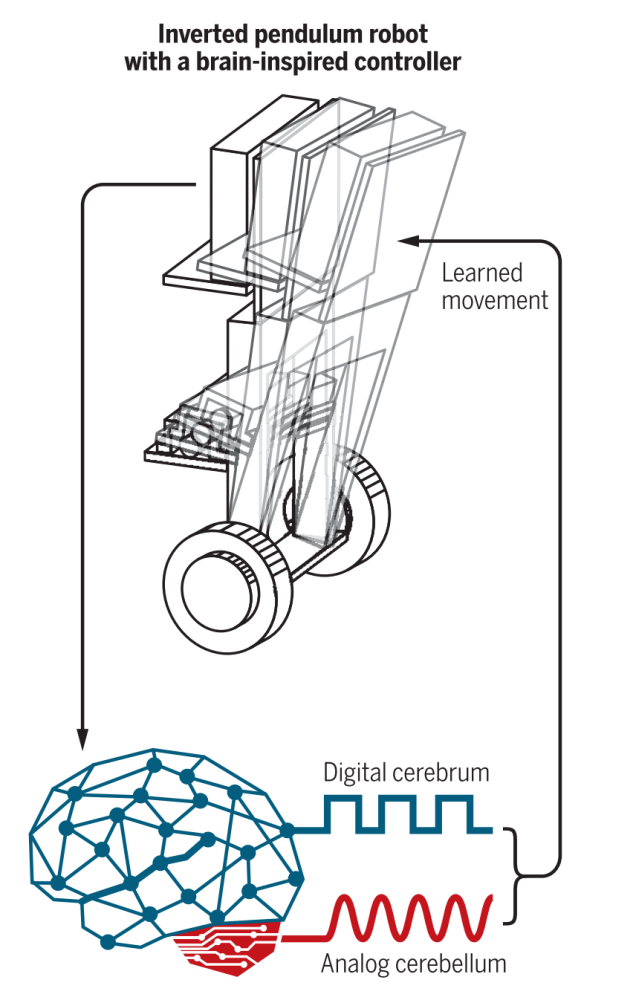
圖|一種基于記憶器控制的混合系統。 倒立擺機器人具有模數混合計算和自適應學習能力,用于快速、節能和改進的機器人運動控制。 這些函數只由兩個記憶體實現。 (資料來源:研究文件)
與標準的全數字系統相比,這種模擬信號系統的處理速度更快,效率更高。 這不僅減少了原有的功率需求,而且將處理循環時間從3000微秒減少到6微秒。 這大大提高了機器人的穩定性,如果只使用數字平臺,機器人通常需要三秒鐘以上才能完成單個任務時間,現在只有1秒完成并穩定下來。
除記憶器外,混合系統的其他部件可以通過商用電子元件來實現。 這將使類似的機器人運動控制器與更孝順和更輕的機器人結合使用,使它們能夠以更高的能量效率和更快的速度響應不斷變化的環境。
然而,研究人員也表示,這只是目前概念的證明。 他們建造的機器人體積小,形狀基本,在模擬電路上運行的算法相對簡單。 然而,可以確定這一概念被證明是非常有前途的,并且在基于記憶器的神經形態學和模擬計算硬件方面投入了大量的研究和開發。
參考文獻:
https://robotics.sciencemag.org/content/5/47/eabe6818
https://singularityhub.com/2020/10/26/how-giving-robots-a-hypid-human-like-pain-can-make-them-smarte