智能應急救援裝備趨勢:小型救援機器人

導讀:介紹READ現有的小型救援設備仍難以滿足救援需要,需要進一步研究陸地救援設備,因為對人員構成巨大威脅的事故大多發生在陸地上,因此陸地救援設備種類更加豐富。 功能也更加多樣化。 根據結構和應用要求,可分為小型搜救機器人、大型工程救援設備和...

指南
語言

閱讀
現有小型救援器材仍難以滿足救援需要,需要進一步研究

陸地救援設備
由于大多數對人員構成巨大威脅的事故發生在陸地上,因此陸地救援設備的類型和功能更加豐富。 根據結構和應用要求,可分為小型搜救機器人,大型工程救援裝備和救援保障裝備。

1.3.1小型搜救機器人
小型搜救機器人主要用于替代救援人員進入復雜地形災害點完成環境監測,生命搜尋等任務。 根據不同的運動形式和功能,可分為履帶式搜索機器人、輪式搜索機器人、仿生搜索機器人和小型救援機器人。
(1)履帶式搜索機器人。
履帶機器人具有支撐面積大,在崎嶇路面上具有良好的運動性能,是目前應用最廣泛的救援機器人運動模式之一。 在救援過程中,主要通過智能環境感知和路徑規劃完成生命搜索、對象搜索等功能。 為了提高機器人的環境適應性,救援人員在傳統履帶結構的基礎上,開發了變形履帶機器人等新型移動機器人。
傳統的履帶機器人最初主要用于軍事行動,而且大多尺寸較大,不適合在拆卸后的小空間中尋找被困人員人員。 為了解決這一問題,許多研究人員開發了基于傳統履帶機器人的變形履帶機器人。 這種類型的履帶機器人可以根據地形改變形狀,更好地適應復雜的環境。 例如,奧地利應用科學大學的EDLINGER設計了一個履帶式救援機器人,如圖6所示,該機器人具有導航和感知能力,具有良好的移動能力,可以連續跨越多達15個斜坡地形以及40~45個樓梯。
具有代表性的履帶式搜救機器人也是2010年由Sandia實驗室開發的Gemini-Scout救援履帶。如圖7所示。 履帶的行走機構采用分段履帶,具有良好的操縱性和較強的跨步,跨槽能力。 雙子座-童子軍車輛長度1.2米,總高度0.7米,無線控制模式。配備視頻捕捉攝像頭,紅外測距儀,多功能氣體濃度傳感器和導航儀,可同時攜帶救援物資,增加了被困人員的救援概率。
此外,日本東北大學(圖。 伊朗圖什理工大學8)(圖。 9)等也對可實現的履帶式搜救機器人進行了相關研究。
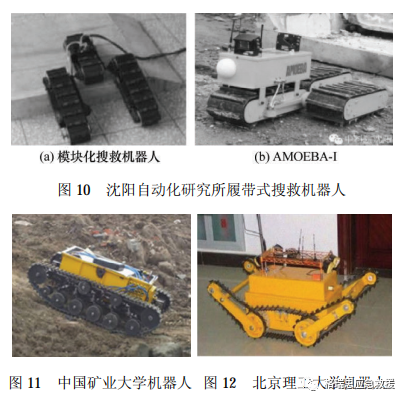
在我國,履帶式搜救機器人的研發起步較晚,但仍取得了大量的研究成果。 中國科學院沈陽自動化研究所于2005年研制了一種可重構模塊化履帶式搜救機器人,如圖10a所示。 可根據路面情況進行配置重構,有九種運動配置和三種對稱配置,可根據地形進行配置變換,適應復雜環境。然而,機器人的硬件和軟件很難控制和驅動。
此外,沈陽自動化研究所也開發了一個變形履帶機器人AMOEBA-I,如圖所示。 具有快速轉彎、克服障礙和跨越溝槽的能力。 在常規模式下,可跨越障礙達29.63cm,在前后履帶臂的配合下,最大高度58cm可以跨越障礙,機器人整體搜救性能更好。 中國礦業大學設計了一種履帶機器人用于礦山救援,如圖11所示。 機器人采用雙電機驅動履帶單元,動態性能高。 在控制算法上,它可以在速度驅動模式和轉矩驅動模式之間自由切換;。 實驗表明,該機器人具有良好的爬升性能和較高的移動效率。
此外,北京理工大學(圖。 十二),太原理工大學等對履帶式搜救機器人的深入研究。
履帶機器人通過能力強,能在崎嶇路面上快速移動。 改進的變形履帶機器人進一步提高了其越障能力。 但摩擦力大,能量損失大。 此外,履帶機器人一般體積較大,只能在廢墟表面工作,不能進入小碎片內部空間進行搜救。
(二)輪式搜索機器人。
輪式搜索機器人具有結構簡單、可靠性高、移動速度快等特點。
日本京都大學KAZUYUKI開發了一種輪式搜索機器人MATOI,可用于生化武器造成的災害地點,如圖13所示。 該MATOI的質量為109公斤,有效載荷為80,最大移動速度為8.33米/秒。 機器人平臺集成了GPS,攝像頭,激光測距掃描儀等多種傳感器,具有防水,防塵,防電磁干擾等優點。 以色列研發了輪式搜救機器人,如圖14所示。
配備攝像頭,夜視設備及相關傳感器,機器人可攜帶多達300公斤,并能按照預定路線在救援中自動駕駛,可代替救援人員執行危險任務,減少人員傷亡。 此外,瑞士聯邦學院蝦研制的輪式搜索機器人(圖。 和日本東京工業大學研發的輪式搜索機器人R-曲柄(圖。 也是輪式搜索機器人的典型代表。
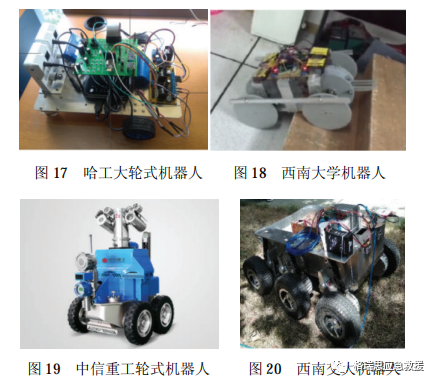
我國輪式搜救機器人的研究也取得了一些成果。哈爾濱工業大學研制了一種用于災害搜索的小型遙控輪式機器人,如圖17所示。 機器人由一個移動平臺,多傳感器,任務計劃器,嵌入式控制器和無線通信模塊組成,總體規模為30m&次;26m&次;18m,并有一個海量kg.1.5
由于機器人體積小,在搜索過程中可以通過手動無線控制移動到廢墟中,應用范圍廣。 西南大學開發了一種基于多連桿結構的輪式機器人,如圖18所示,可用于災害環境檢測和搜索。 機器人長30cm,連桿長51.5cm,底盤高7cm。 通過設計連桿秤,機器人可以很好地解決連桿輪機器人中的奇怪現象,因此越障性能和運動穩定性較好。 此外,中信重工有限公司。 (圖19)和西南交通大學(圖20)還研究了輪式搜索機器人。
車輪搜索機器人是從普通輪式移動機器人發展而來的。 具有結構簡單,成本低,移動速度快等優點。 輪式搜索機器人的設計方法相對成熟,但在復雜崎嶇的災害搜救場景中,機器人的越障能力較弱,在一定程度上影響了現實? =http://www.zhanhuigang.com/zhuanti-10001012.html“titla href=”實木展覽“targeta href=”_空白“titla href >(3)仿生搜索機器人。
為了進一步提高搜索機器人的復雜環境適應性,研究人員受到自然生物的啟發,開發了各種仿生搜索機器人,可用于復雜的災害環境,主要是蛇形搜索機器人。 研究尚處于實驗室階段,未來在應急救援領域具有應用的可能性。
國外對蛇形搜索機器人的研究較早,取得了豐碩的成果。 例如,日本OHASHI開發了一種蛇形搜索機器人ACM-R7,如圖21所示。 長度1.6m,質量11.7kg,有18個自由度,具有防水能力。 然而,由于ACM-R7的每個關節都是獨立驅動的,因此控制系統更加復雜,運動能耗大。 一種基于3D打印的蛇形搜索機器人可用于英國普利茅斯大學的災難現場搜索。 機器人機身采用柔性材料,具有良好的抗沖擊性和較高的剛度。 機器人控制器位于頭部,可以連接到遠程PC,通過無線通信使用嵌入式計算,允許操作員遠程控制機器一個男人。
除上述兩種蛇形搜索機器人外,日本SGI公司與電力通信大學聯合開發的基于爬蟲的蛇形搜索機器人也具有很強的代表性,如圖22所示。 第一代機器人由7個關節組成,串聯連接8個履帶單元。 在7個關節中,除前兩個關節為活動關節外,其余關節為從動關節。 采用KOHGA無線控制方式,安裝了攝像頭,紅外測距儀,多功能氣體濃度傳感器和導航儀,可實現災害現場環境監測。 在此基礎上,研究人員還開發了具有更強環境適應性的第二代機器人。
在家里,西安科技大學的李紅艷瞄準了一個煤礦中的蛇形救援機器人(圖。 研究了礦山事故現場環境參數檢測、姿態控制和路徑規劃等問題,基于優化人工勢場網格蟻群算法和參數自適應調整多目標牽引算法,蛇形機器人具有良好的環境適應性。 北京化工大學開發了一種新型蛇形搜索機器人,如圖24所示。 長度為125毫米,直徑為42毫米,直徑為3.2公斤,質量橫擺角為45度,機器人由8個平行機構組成,具有3個自由度,可以在空間中進行有效的三維搜索運動。
蛇形搜索機器人的尺寸相對較小,能夠進入相對較窄的間隙。 然而,蛇形搜索機器人大多采用被動輪式運動,只適合在平地或水中運動,控制復雜,可靠性低,在一定程度上限制了其在實際搜救行動中的應用。
除了蛇形搜索機器人外,日本東京工業大學和上海交通大學還對腿搜索機器人進行了研究。 然而,由于其移動速度慢、效率低,腿機器人尚未應用于應急搜救領域。
災害救援現場的應用效果表明,當廢墟環境過于復雜時,現有的履帶式救援機器人,輪式救援機器人和仿生救援機不能完全滿足救援需要。 因此,基于上述運動形式,研究人員還對具有復合運動功能的救援機器人進行了研究,使救援機器人具有不同運動形式的優點,提高了機器人在崎嶇地形下的運動效率。 典型的救援機器人有輪腿復合救援機器人,輪腿復合救援機器人等。然而,上述救援機器人仍處于實驗室階段,在實際應用中存在一定的差距。
(4)小型救援機器人。
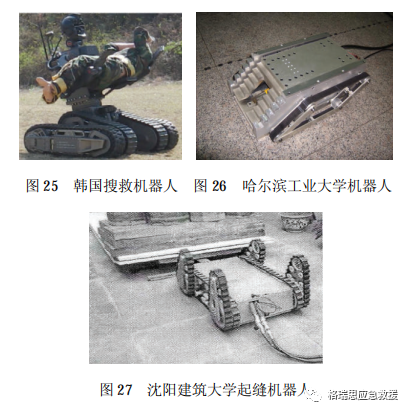
上述履帶式或輪式機器人搭載各種傳感器完成搜索任務。 在此基礎上,許多學者可以通過在機器人上攜帶操作裝置來完成更復雜的救援任務。 例如,韓國開發了履帶式救援機器人,如圖25所示。 它由頭部、軀干和兩個機械臂組成,可以通過機械臂運送傷員。 在此基礎上,研究人員還對其穩定性控制方法進行了研究。
在中國,哈爾濱工業大學在履帶式救援機器人上配備了執行裝置。 可利用蠕動功能在重物下方設置移動通道使其穿過底部,并能在廢墟環境中完成拼縫和頂撐等不同任務要求,如圖26所示。 機器人至少可以穿透40毫米的裂縫,這可以帶來7物體00公斤支撐到離地面410毫米。
此外,沈陽建筑大學還研究了能夠完成救援任務的小型移動機器人(圖。 27)。
由于許多救援領域具有較強的特殊性,一般救援設備難以滿足救援需要。 許多研究人員為特殊救援領域開發了各種特殊救援設備。 其中,具有滅火功能的消防救援器材最具代表性。 這種救援設備可以代替救援人員完成高層或超高層建筑的消防任務。 國外起步較早,對美國,日本等消防機器人進行了研究。
霍奇森科技研發的一款遙控滅火機器人為ThermiteRS1-T2,如圖28所示。 采用履帶行走機構,由18.64kW柴油機供電,攝像機可在火場內部進行偵察。 拖動水帶主要通過機器人,同時用全方位噴頭進行滅火操作,每分鐘可提供2211L水。 美國InRobTech公司生產消防機器人FFR-1,如圖29所示,該機器人配備了冷卻系統,允許機器人為6,機器人通過在1000℃的高溫環境中保持自身溫度在600左右,具有很強的抗高溫能力。
在國內,中國礦業大學開發了一種消防機器人,如圖30所示,并對不同俯仰角的消防炮運動穩定性進行了研究和[54]。 中信重工股份有限公司研發的消防機器人如圖31所示。 消防水炮工作壓力1.2~1.5MPa,最大放電120L/s,最大射擊程為150m,特別適用于石油化工及燃氣等爆炸環境。
基于上述傳統的救援機器人,研究人員將一些新的制度形式應用于消防機器人。 例如,為了解決現有的滅火機器人難以直接接觸火源的問題,東京大學ANDO設計了一個軟滅火機器人,如圖32所示。 機器人噴嘴模塊有兩個出口端口,通過對出口水流的控制,可以保持軟滅火裝置的穩定飛行。 實驗表明,大約2米長的機器人可以利用水的反作用力在空氣中穩定飛行,并能改變噴嘴的方向。
上述研究表明,為了提高救援效率,國內外對小型救援設備進行了研究。其中,滅火器材的研究較為成熟,在救援現場可以完成一些救援任務。 但小型救援設備仍存在功能簡單,難以完成復雜任務的問題。 由于災害現場環境的復雜性,作業對象和任務的多樣性和較強的不確定性,對機器人操作的準確性,運動的靈活性和救援的可靠性提出了更高的要求。 因此,現有的小型救援設備難以滿足救援需要,需要進一步研究。
免責聲明
資料來源:機械工程學報
所有注明為其他媒體來源的信息來源均轉載自其他媒體,并不意味著網絡同意其觀點,也不意味著網絡對其真實性負責,請聯系原始來源。 如果您對本文內容有任何疑問或疑問,請立即與后臺編輯聯系。 平臺會快速響應和處理您。 備注公司原創內容,轉載請聯系我們哦!