無軌檢查機器人在煤礦運輸巷中的應用

導讀:巡檢呆板人經過視覺辨別本領,對巷道情景以及進步行道路路上海展覽中心現的職員進行辨別,進而實行自決行走和避障,遏制過程如圖1所示。 圖1 巡檢呆板人路面辨別和職員辨別遏制過程 巡檢呆板人安置有四個路面識其他攝像頭,安排攝像頭收集圖像,領略道路邊際消息,按照邊...

巡檢呆板人經過視覺辨別本領,對巷道情景以及進步行道路路上海展覽中心現的職員進行辨別,進而實行自決行走和避障,遏制過程如圖1所示。
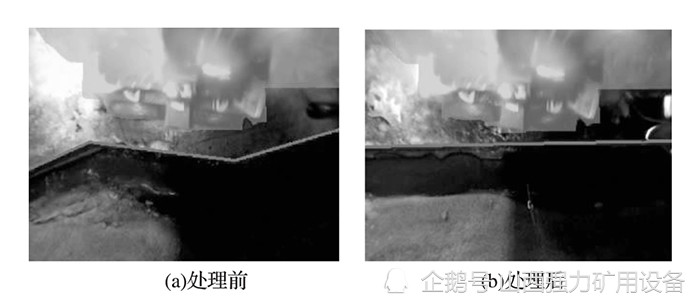
圖1 巡檢呆板人路面辨別和職員辨別遏制過程
巡檢呆板人安置有四個路面識其他攝像頭,安排攝像頭收集圖像,領略道路邊際消息,按照邊際消息領略呆板人的轉向遏制和速率遏制輸入;前后攝像頭收集圖像,領略職員辨別,標牌辨別,辨別截止遏制疏通狀況,如呆板人能否須要掉頭,能否須要遏止巡檢,能否須要休憩疏通等。兩個遏制輸入的截止進行歸納,獲得最后的遏制旗號,遏制呆板人疏通。
1巡檢呆板人路面邊際辨別

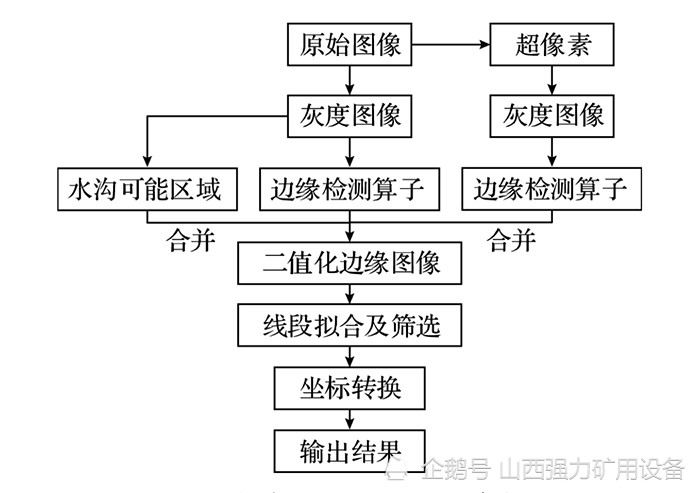
巡檢呆板人經過安排兩顆攝像頭拍攝的圖像消息對巷道路面進行辨別,本計劃中經過采用圖像中進步目的一側溝渠邊際動作特性消息引導巡檢呆板人的前進道路,辨別過程如圖2所示。
圖2 巡檢呆板人路面辨別過程圖
巡檢呆板人遏制體例讀取視頻輸出獲得的彩色圖像,攙雜圖形運用超像素分隔,采用SLIC(大略的線性迭代聚類)算法進行處置,其截止經過邊際檢驗和測定算法并貫串溝渠地區獲得優化的邊際,二值化圖像并運用線段檢驗和測定,挑選線段并拼接為折線動作溝渠邊際,結果將其像素坐標變換為巡檢呆板人坐標系,獲得最后道路截止,如圖3所示。(灰色線為識其他邊境)
圖3 巡檢呆板人輸入的邊境辨別圖像
2巡檢呆板中國人民銀行走遏制本領
經過視覺體例辨別出的道路邊際為貫串的線段,長度場所等缺點定。遏制將一切線段消息進行領略,獲得呆板人溝渠側道路趨向和火線道路趨向,計劃巡檢呆板中國人民銀行走目的趨向,最后獲得巡檢呆板人轉向消息,并按照轉向消息遏制巡檢呆板人速率(轉向越大,速率越小)。
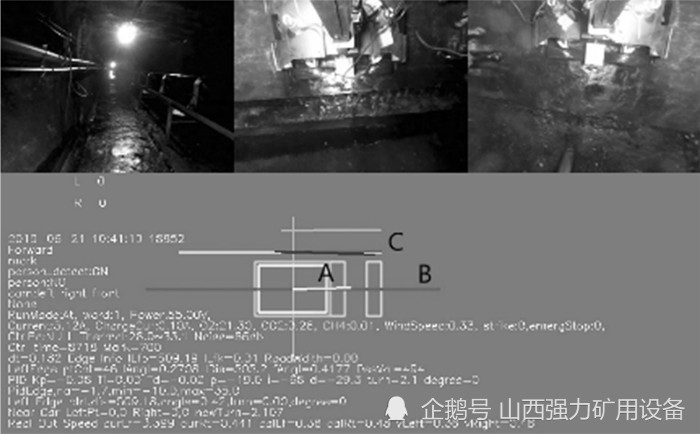
按照進步行道路路邊際每間隙3cm一個坐標點擬合道路趨向本領為:從呆板人中央到呆板人最火線,擬合一條直線(直線A),從呆板人火線發端處到呆板人火線1m處,再擬合一條直線(直線B),如圖4所示。
圖4 巡檢呆板人目的遏制截止表示圖
按照擬合直線計劃轉彎角度本領為PID遏制算法。以視覺辨別體例輸入的溝渠邊際為線段C,PID遏制目的為使直線C一切的點隔絕呆板人重心線保護樹立值(呆板人寬度一半+呆板人邊際到道路邊際間距)。
PID遏制項為呆板人轉向角度。在經過直線B計劃獲得一個轉向角度后,須要經過直線A控制轉向角度,以保護呆板人疏通后邊際不會侵占道路邊際。以保護呆板人疏通的安定性。呆板人速率遏制基礎邏輯為轉彎角度越大,速率越低。
3巡檢呆板大眾員辨別本領
在巡檢呆板人自決巡檢行走進程中,進步行道路路上當面走來處事職員時,安排讓巡檢呆板人遏止進步,直到火線職員成功從巡檢呆板人側方通過后,貫穿巡檢。
巡檢呆板人遏制體例讀取前后攝像頭輸出獲得的彩色圖像,喂給Darknet深度神經搜集,獲得每部分的場所消息列表,過濾掉遙遠的人,列表非空,則火線近處有人。
4巡檢呆板人折返和遏止遏制
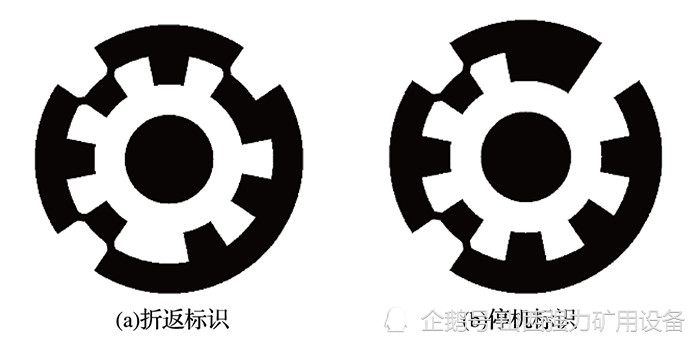
巡檢呆板人在運轉進程中,須要安排自動往復功效,在帶式保送機機頭和機尾場所樹立往復的特性旗號標識,巡檢呆板人經過前后攝像頭檢驗和測定到折返旗號后登時停機折返,如圖5(a)所示,檢驗和測定到遏止標識則阻礙巡檢工作,如圖5(b)所示。
圖5 巡檢呆板人折返、遏止標識
自動化帶式保送機無軌巡檢呆板人體例,實行了巡檢呆板人自決行走、遇人泊車、往復巡檢,及時收集帶式保送飛機運輸轉進程中的氣體情景消息、視頻消息、聲響旗號、熱感圖像,及時創造存在的安定隱患,原地聲音燈光電報告警方共同報告警方旗號上傳,為帶式保送機沿線安定消費供給了保護,本能目標實足符合現場訴訟要求,可在確定程度上包辦人為在帶式保送機沿線的巡檢工作,符合煤礦企業對輸送體例智能化遏制、少人化處置的訴訟要求。