天津大學最新研發:3D打印軟機器人

導讀:華夏青年報客戶端天津1月20日電(中國青年報中國青年網球隊記者 胡春艷 通信員 劉曉艷) 像一只精致的尺蠖,牢牢地抓住圓形管,在一伸一縮中曲折前行。這是采用天天津大學學科學技術處事者研究開發的一種新式模塊化柔性啟動本領并用3D打字與印刷機直接打字與印刷出來的軟性呆板人。 軟性呆板人因...
華夏青年報客戶端天津1月20日電(中國青年報中國青年網球隊記者 胡春艷 通信員 劉曉艷)
像一只精致的尺蠖,牢牢地抓住圓形管,在一伸一縮中曲折前行。這是采用天天津大學學科學技術處事者研究開發的一種新式模塊化柔性啟動本領并用3D打字與印刷機直接“打字與印刷”出來的軟性呆板人。
軟性呆板人因其較高的柔性和對人體安定等便宜,在近幾年獲得了貫穿一致的關心。而3D打字與印刷的上風即是創造攙雜形骸、攙雜構造并且不須要后續加工,可一次成型。打字與印刷免組建構造,是3D打字與印刷本領創造軟性呆板人比年來一個比擬典范的運用。
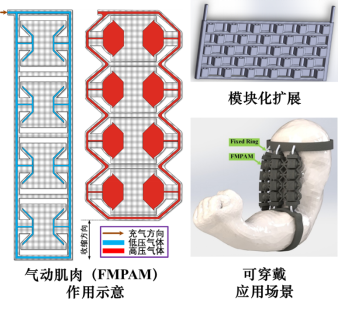
(圖片證明:鑒于薄膜氣缸的新式氣動聽工肌肉安排觀念及其運用場景)
不日,天天津大學學左思洋、劉建彬課題組提出了一種鑒于薄膜氣缸的新式模塊化柔性啟動本領,并經過按照簡直運用變換陳設拉攏辦法以及合理安置貫穿計劃,將其運用于人為肌肉和管道匍匐呆板人中。該本領鑒于一次3D打字與印刷成型的創造本領,省掉了保守機電擺設加工創造中的安裝過程,大幅貶低了啟動模塊的創造本錢和周期,且完備耗襟懷孝動靜相應高、真實性高、對運用場景符合性強等特性。該功效2021年1月初在線公布在《美利堅合眾國電氣電子工程師學會呆板人和自動化快報( IEEE Robotics and Automation Letters)》上。
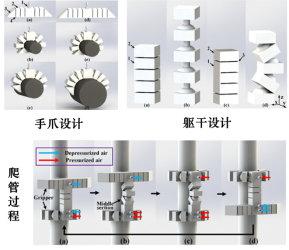
(圖片證明:鑒于薄膜氣缸的管道匍匐呆板人安排觀念)
“每一個薄膜氣缸就比如人體的第一小學塊肌肉,大概爬蟲的一個‘節’,只但是是用熱塑性聚氨酯材料做的。”劉建彬表明說,采用這種新式薄膜氣缸構造是共青團和少先隊的“奇思妙想”,即使把這個構造比方成一個基礎的肌肉單位,那按照不同的運用需要再對這些單位的貫穿辦法進行陳設拉攏和構造貫穿,就像是把一個個的肌肉單位貫穿起來產生一整塊肌肉,而后再運用于不同場景,而整塊“肌肉”的創造進程則采用了3D打字與印刷本領,一次成型。
鑒于此創新意識,課題組開始提出了一種新式氣動聽工肌肉,可運用于柔性外骨骼等人機交互裝置的啟動中。氣動即以收縮氣氛為動力源,開辟板滯實行伸縮或回旋辦法。與保守氣動聽工肌肉比擬,該安排最超過的特性是不會爆發厚度目的的伸展,進而遏止了對人體的擠壓。其他,課題組還提出了一種新式氣動管道匍匐呆板人,可運用于產業管道辦法的查看和及時監察和控制。該管道匍匐呆板人采用仿生尺蠖道理,經過精巧安置薄膜氣缸單位之間的貫穿,實行呆板人在管道內、外壁面匍匐。柔性啟動辦法的運用使該呆板人不妨符合大范疇管道直徑的變革,并可應付直管、彎管、豎管、程度管以及百般角度歪斜管運用場景,同時呆板人可接受自重80倍以上負載。
由于采用了氣動的本領啟動,軟性呆板人只能拖著長長的氣管尾巴處事。即使將傳感器集成到擺設中,也就能去掉這些氣管尾巴,使呆板人更獨力精制,而這是科學家們將來的全力目的。
根源:華夏青年報客戶端