戴森掃地機對比Neato D7,小米掃地機器人對比小瓦,2018 掃地機器人深度對比與選購攻略

轉載來源:什么值得買,作者:air04,文章有刪減。
劇情回顧:
大家好,我是那個不拆不舒服斯基,不折騰不舒服斯基的air04
618馬上到了,我抓緊時間抓緊手上的機器,寫了這篇掃地機的選購攻略,我想我大概是有掃地機收集癖吧,或者吸塵器收集癖,我家已經堆滿了各種掃地機和吸塵器。
在正式開始產品對比測試前,我想先就目前掃地機產品最常被提及的問題,先說幾點:
關于邊刷的效果:
邊刷這個部件我相信大多數掃地機用戶都不會陌生。對這個部件很多人都覺得是越多越好,雙邊刷一定比單邊刷好。
但邊刷在整個掃地機清潔過程就如同它的名字一樣,就是起到貼墻時候彌補掃地機主塵刷與墻壁之間邊緣用的。清掃地面時候主要還是主塵刷在起作用。在neato、iRobot、小米這樣主塵刷本來就給力情況下,清掃大片區域時候邊刷多或是少都影響不大。
塵盒大小怎么看?
塵盒容量一直是我使用掃地機幾年后比較關注的一個參數。因為它直接關系到了我清潔掃地機塵盒的頻率。我當然是希望一個星期才清理一次塵盒,最好是更久一些。但是掃地機塵盒容量參數一直是我比較迷惑的一點。iRobot961的塵盒容量參數僅僅比neato D5小了0.1L,真正能吸入的量卻連360掃地機的塵盒容量都達不到。為什么?
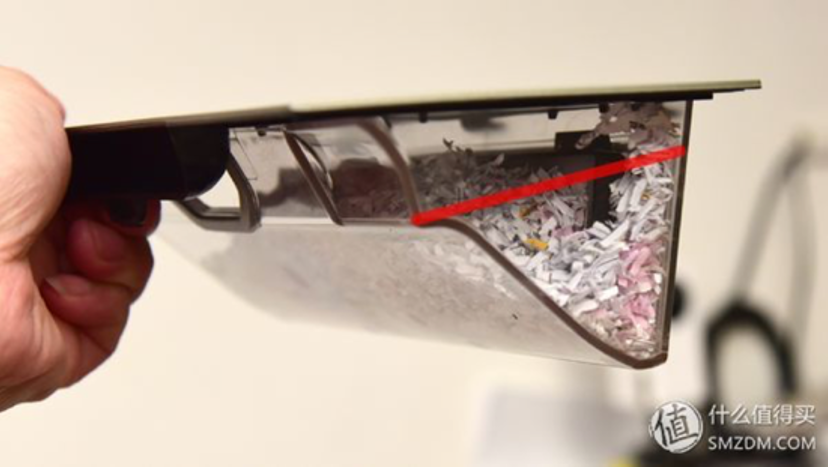
▲偶然測試中發現了一個細節,塵盒內有一部分空間是無法利用起來。比如這neato的塵盒,只要超過紅線部分紙屑就會從主塵刷口掉出來。紅線以下部分才能算是“有效容積”。
基于這個發現再來看iRobot961的塵盒,就不難發現標稱0.6L卻裝不了多少垃圾的原因。因為吸入口下沿太低了。難怪在上一篇的測試中垃圾存儲量是最少的。
戴森的塵盒上面也標注了最大容量位置。并不是放滿整個塵盒。
綜上所述,塵盒容量看頁面參數來比較沒有什么意義,因為連無效容積也被統計了進去。實際使用中的掃地機neato的塵盒真容量最大,然后是米家掃地機和小瓦規劃版(塵盒一樣的),石頭掃地機稍微小一點,接著是戴森360EYE和360掃地機,墊底是iRobot961 和871(塵盒一樣大)。
2018新技能:電子虛擬墻
在360掃地機中,這個功能稱之為“禁區”,neato則稱之為no go line。電子虛擬墻就是在APP生成的房屋清潔地圖上,任意設置掃地機不能進入的區域。在實際清掃中掃地機就繞過這個區域。
這個功能雖然neato和360最后實現結果上差不多,但過程有點區別,應用方式也有不同。
360:
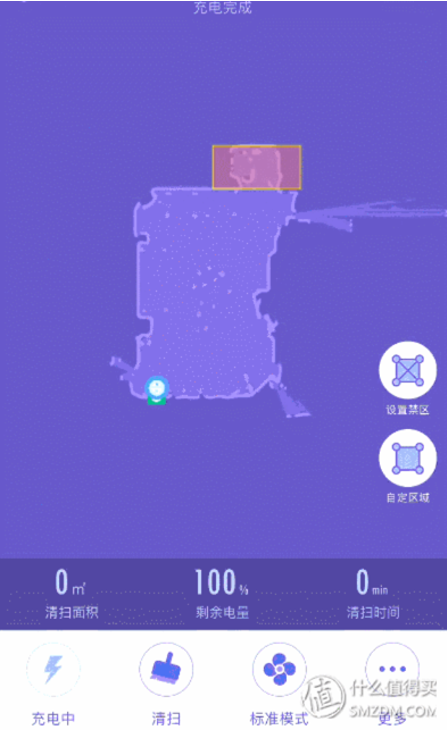
360的禁掃區就像是一個區域清掃的反向應用。一個是要清掃這個區域,另一種是不要清掃這個區域。
但360最大的問題是:360 不能將禁掃區保存在地圖上,每次清潔時都要重新圈定
neato D7:
neato D7的禁掃區地圖也是需要完成一次全家的清潔后,在APP生成的清潔覆蓋地圖上來設置。不同于360,neato的虛擬禁掃區可以一直保存在這個地圖上。
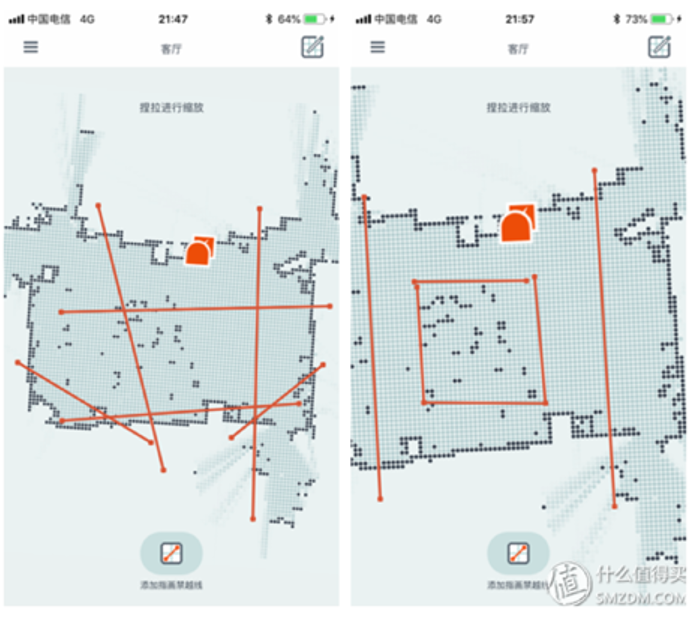
只要設置一次,neato在每次清潔時都能啟動。
除非你把D7拿去了一個新的房間,它要重新繪制新的地圖。
neato D7的禁掃區no go line就像是現實中鋪設一條虛擬墻一樣。你劃定一條線,掃地機無論正反面都不會越過這條線。就像是西游記中孫悟空畫的線,人可以過,而掃地機這個小妖精就不會逾越。
neato D7對no go line的數量似乎并沒有限制,實測把一間23平方的客廳畫滿都可以。
新導航技術:
LDS激光導航發展到現在可以說是非常成熟而且廣受好評的導航之一。廠商也在不斷的發展其它非LDS的導航技術,比如視覺導航。這也是2018年井噴式的出現了。
視覺導航其實算不得是今年的創新技術,不過今年發視覺導航類機器比較多,這些攝像頭里面有戴森這樣360度全視角識別物品來導航的,也有僅僅是對著天花板做標記識別進行模糊導航的。
這次我借來了這臺售價高達6399元的戴森視覺導航機器與大家一起分享一下使用經驗。
然后就在5月份小瓦還發售了一個有意思的規劃版小瓦掃地機。這款掃地機使用了一個類似鼠標傳感器的設備,檢測掃地機在地面滑過的距離和速度,加上掃地機碰撞的位置計算,就能大致得出掃地機的位置和房間圖。這種導航方式在之前單獨曬單中已經實測可以輕松打理多房間,不像無規則清掃那樣對多房間清潔效果差,效率低。
那么和激光導航比起來,這種電眼導航到底能達到怎樣的效果?這就借用掃地機“椅腿森林”來走一遭看看效果如何。
正式測試開始 - 椅腿森林:
“椅腿森林”最早是掃地機用戶來評判掃地機脫困能力的一個方面。以前的掃地機最容易卡在飯桌周圍的桌椅里面出不來。餐廳這一塊桌腿加上椅腿扎堆就像森林一樣,沒有導航的掃地機進去了就迷路,就算是有導航的掃地機也不一定出的來。

▲測試時候就搭建這么一個有6腳蹦床、宜家茶幾、桌子加上一張椅子的主要場景,看各家掃地機的清掃效果。
第一組:neato D7 VS Dyson 360 eye
neato D7:
這是D7跑測試之前的地面。

▲元祖畢竟是元祖,在測試中D7對障礙物處理的很好,就像能看見一樣,對障礙物保持了固定的距離進行清掃。

對三腳架也只是輕微觸碰就繞過,沒有推動三腳架,即使這個三腳架很輕便。在其他掃地機測試中多少都能看到掃地機推動這個三腳架。在這次掃地機橫測中D7處理的最優秀。
清掃過后的地面,鉆不進去的椅子下面留了一點紙屑。

▲其余地方就一兩個紙屑殘留。整個地面潔凈度非常好。
戴森 Dyson 360 Eye智能吸塵機器人:
戴森這款掃地機在發布之初可是賺足了眼球。以至于上一篇文章中很多值友留言想要看對比。正好我有個朋友非常迷戴森的產品,就慫恿他買了一臺。(測完我覺得我是個損友)現在借過來跑一下對比測試。
▲戴森的塵盒好評,從外面就直接能看到塵盒內容塵量,什么時候要清理一目了然。不要小看這個塵盒,容量不校
很多值友在評論中喜歡吐槽米家掃地機太高,鉆不進床底。吐槽neato太高,激光頭撞茶幾。這些缺點在戴森面前都是浮云。別問為什么差別這么明顯,近大遠小的原理我懂,所以我都把戴森擺遠點了。

前部經常會撞擊到各種家具。留下傷橫累累。

有一點需要指出操,它的預約執行是通過服務器下達指令來進行的,也就是它斷網狀態就不會按照定時來進行清掃。這與小米、neato的主機本地定時清掃的策略不同,在沒有網絡或者網絡不好的情況下就比較不方便。
下面來進行椅腿森林測試:

▲戴森這款掃地機在光線正常的情況下清掃規劃也算不錯
但是在黑暗中就不是太靈光。

就像smart一樣可以出入普通掃地機進不去的地方,比如這次色是中的椅子底下。它也是這次椅腿森林陣中唯一一個可以完全清掃干凈椅子底下紙屑的掃地機。
戴森對于三腳架這樣探測不到障礙物處理不太好,經常會爬上去,不過它是履帶式的,上得去也有能力下來。這對它來說都不是事。

▲dyson前方由于缺失良好的避障系統,除非障礙物高的能被攝像頭看到,否則就是直接沖上去。加上沒有實體虛擬墻也沒有電子虛擬墻,地面上需要收拾的干凈一些才行,不然……不是你家貓主子遇到它,就會出現戴森大戰毛巨人的情景。

▲但體型也同樣是它的痛點。由于身高太高,它甚至鉆不下我已經特別墊高的沙發底下,也是這次對比橫測中唯一一臺鉆不下沙發的掃地機。
最后測試結果,由于每次都以卡住結局,我也不知道算不算清掃結果。整個大片區域漏掃情況是最嚴重的。得益于窄小的機身,桌椅森林中倒是比其他的機器更干凈。
最這臺機器從我借過來到現在測試了大約15遍。是唯一一臺一次都沒有回充的掃地機。
它連最基本的虛擬墻都沒有,我除了關門就沒辦法限制它不去哪里。
測試完這臺機器,我才意識到了虛擬墻真的很重要。
第二組選手:米家掃地機VS 小瓦掃地機器人規劃版 VS 360 掃地機器人
米家掃地機 小米掃地機機器人:
米家掃地機,掃地機中的武藤蘭。大容量電池,大吸力,大塵盒。便宜、好用,該有的常用功能都有。沒有花銷的功能,一切都以實用為準。可以說是掃地機中入門的首選,一直是掃地機中的標桿產品。剛發售時候一度需要加價才能購買到。
一樣來跑一次椅腿森林。這是未清潔的地面,撒上了紙屑。清掃穿插游刃有余。

由于缺少前部光學傳感器,米家掃地機對這樣的斜坡障礙……

直接懟上了下不來。這一點就遜于戴森和neato,米家掃地機在測試的時候偶爾會爬上三腳架下不來。
最終清掃結果

紙屑剩余最多的地方就是這張椅子底下,因為米家掃地機的直徑比較大,鉆不進椅子下面,這才造成了漏掃。其余地方都掃的比較好,最多就一兩個紙屑遺漏。
實話說,米家掃地機的清潔能力和規劃能力比較強,但是爬坡能力稍微尷尬一點。有些地方就是爬上去了下不來。
在后期的固件功能更新中新增加了劃區清掃的功能。但是它不會也不能保存地圖。劃區清掃的地圖是根據最后一次規劃所得的地圖而來。如果最后一起規劃失敗了,那么就沒有劃區清掃的地圖可用。
小瓦掃地機器人規劃版 E20:
小瓦掃地機規劃版是石頭科技在18年5月份剛開始發售的掃地機型。特點是去掉了激光導航,以安置在掃地機底部,類似鼠標的傳感器來檢測移動的距離和速度,輔以碰撞板、加速計、高精度陀螺儀來計算房間地圖與自身位置。

▲這是未清掃之前隨機灑落的碎紙機紙屑。由于紅外線近距離傳感器的加入,掃地機對三腳架處理看起來要比米家掃地機好得多。僅僅只是少許的騎上去,馬上就退了下來。
清潔最關鍵的椅腿森林部分。圍繞外圍桌腳轉了一遍。然后再圍繞左側桌腳轉了一遍,對椅腿森林的處理也就這樣了。

最后清潔之后可以看到在三腳架周圍和桌子、椅子底下有小面積的遺漏。在大片區域上清潔度還是不錯,僅有一兩個紙屑。
小瓦掃地機規劃版的清潔能力還是比較值得肯定,在大面積的清掃情況下清潔能力與激光導航的米家掃地機相當。只有在較為復雜額定桌椅腿之間才會出現漏掃的情況。勝在并沒有被椅腿森林控制住,清掃完成之后也成功回充到充電底座。
從測試結果來看,小瓦規劃版比較適合清淡、家具不多的裝修環境使用,類似日風、性冷淡風等裝修環境它就能夠很好的勝任,與激光導航的掃地機也不會有明顯區別。如果需要掃更大的面積,最近也新出了一個大容量電池版本,電池容量與米家掃地機相當。
最后回答疑問,小瓦規劃版是有地圖的。清掃過程中也能看到逐漸生產的地圖,只是精度沒有米家、石頭掃地機高。
360掃地機:
360掃地機,剛發售時候的價格堪稱屠夫。比米家掃地機多了一個邊刷,多了濕拖功能。價格還更便宜。 在實際使用中和宣傳的稍微有點差距。我對它的不滿主要在蓄水板上,官方稱之為底盤。
我的蓄水板上那兩個插入機身固定的腳在第二次使用的時候崩斷了。在詢問了售后之后被告知只能花265元購買新的蓄水板。跟朋友交流了一下經驗,才發現原來我也不是個例。
好吧,就當一個沒有蓄水板的普通掃地機去用就是了。

這是未清潔時候的地面。360掃地機也會像米家掃地機一樣圍繞桌腳進行清掃。
對三腳架障礙物處理能力一般,會推著走。好在不會騎上去。

360掃地機雖然看上去比較高,但是清掃一般家具底部還是沒什么問題。

椅子下面鉆不進的區域有紙屑殘留。其余地方清潔的都比較干凈。360掃地機在清掃這樣的紙屑時候雙邊刷還是比較給力的。
總結與購買推薦:
1. 對于家居面積大,環境比較復雜,且對掃地機器人有頻繁使用需要的值友
- Neato D7是最值得推薦的產品。Neato不愧還是智能規劃型掃地機的鼻祖,D7在各方面的表現都很出色,D型設計的邊角清潔能力優秀,大塵盒的容量可觀,寬主刷的打掃效率極高,no go line的禁區隨心所欲,對待粉塵的強吸力。都配的上6000元級別機器的價格,要說缺點,除了價格還是挺辣手的,好像我也沒別的挑剔了
- 如果想降低一些價格門檻性,個人推薦購買neato今年的次旗艦D5,除了暫不具備no go line的禁區功能以及在細節用料方便不如D7高級感強烈,在路徑規劃與清潔能力上與D7幾乎沒有太大差異。
- 這次對比測試中在6000元價位的掃地機選擇上戴森360Eye不敵neato 。事實上,戴森360Eye因為規劃清掃效率低,經常卡在家具上問題甚至不如在場其它千元機。沉迷戴森的同學可以醒醒了,我甚至找不到一個可以說服我購買它的優點,我朋友在問我它的表現的時候,我只能保持沉默,如果他知道6k級別的機器在很多地方還不如千元機,這種場面我不敢看 ,不過我問了他一個很尷尬的問題,平時你回家都能在充電座上找到它嗎?他也保持了沉默
2. 對于家庭裝修簡單,清掃環境也相對簡單的值友
- 小米掃地機在這個價格來仍然是非常值得買的,除了清掃效率、吸力、塵盒大小不如D7,當然也沒有禁區設置的功能,避障和越障能力也待提高以外,普通的清掃功能也是可以勝任的
- 選擇小瓦規劃版還是米家掃地機,這還是要看個人需求,小瓦帶拖地功能,去掉了激光導航,如果環境比較復雜,肯定沒有米家適合
- 360的機器品質實在是無力吐槽,還沒開始用就蓄水板掰斷,售后簡直不可理喻265買一個配件??如果在這個價位你想選擇360除了建議你做好售后的準備,我還是要建議你選擇小米或者小瓦