飛行雙腳機器人:四個內涵扇動,廣東工業大學

異讀:呆板之心通訊 呆板之心編纂部 縱然是在生人的養護下,但雙足呆板人 Jet-HR2 簡直短促地飛了起來。 幾年前 ,來自廣東產業大學的接洽共青團和少先隊開拓了一種雙足呆板人 Jet-HR1。該呆板人經過嵌入腳部的袖珍涵道電扇行家走時變換中心來維持平穩。此刻該接洽共青團和少先隊將這種...
呆板之心通訊
呆板之心編纂部
縱然是在生人的養護下,但雙足呆板人 Jet-HR2 簡直短促地飛了起來。
幾年前 ,來自廣東產業大學的接洽共青團和少先隊開拓了一種雙足呆板人 Jet-HR1。該呆板人經過嵌入腳部的袖珍涵道電扇行家走時變換中心來維持平穩。此刻該接洽共青團和少先隊將這種足部安置電扇的安排又做了進一步的矯正,讓第二代雙足呆板人 Jet-HR2 飛了起來。
動作一個完備遨游本領的呆板人,Jet-HR2 上衣有 2 個遏制器偏航遏制器和變槳遏制器。該接洽用試驗展現了兩種遏制器的效率。開始,在沒有偏航遏制器的情景下遨游,呆板人的遨游軌跡會明顯偏移,以至呈確定的回旋趨向,如次圖所示:
一切的考查都是用同樣的模樣升起的。為了提防呆板人遺失遏制并掉下來,在呆板人的腰部安置了兩根碳管來抓住它。固然飛得有點「慌張」,但總歸是飛起來了。
其次,在沒有變槳遏制器的情景下,呆板人會向前遨游,并有俯沖摔落的趨向:
結果,在變槳遏制器和偏航遏制器都就位的情景下,Jet-HR2 實行了較好的飛騰遨游,寧靜功效也不錯:

Jet-HR2 的實行道理
輿論鏈接:https://arxiv.org/pdf/2108.11557.pdf
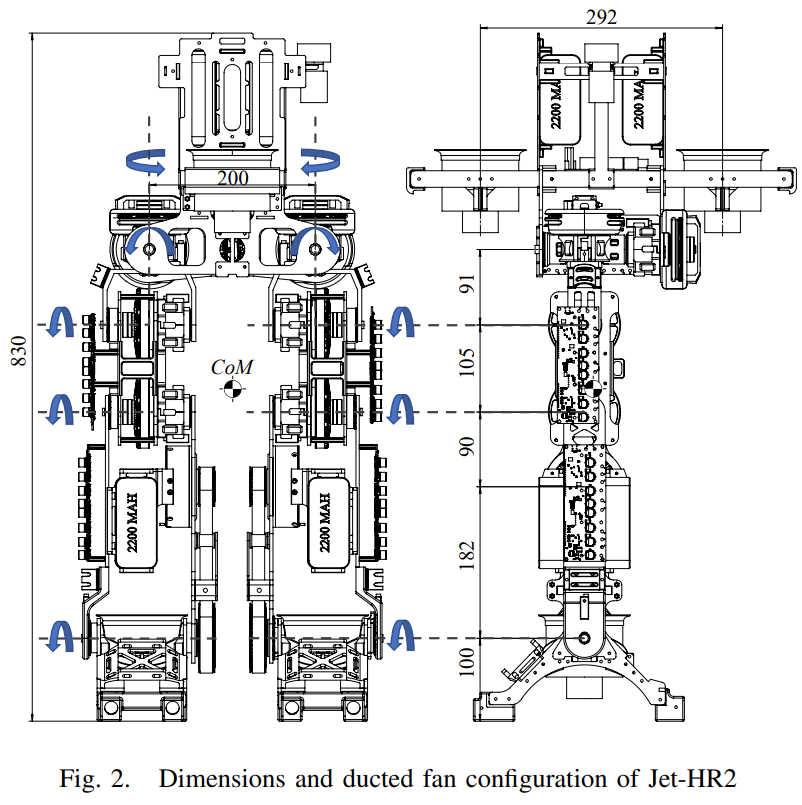
Jet-HR2 呆板人有 10 個關鍵,由無刷電機和用來疏通的諧波啟動器啟動。為了克復小推力分量比前提下寧靜模樣升起的挑撥,該接洽鑒于推力矢量的觀念安排了 Jet-HR2。它的促成體例由 4 個涵道電扇構成,個中 2 個恒定在呆板人腰部,其余 2 個安置在腳上,用來推力矢量遏制,并經過在遨游進程中安排腳的模樣來遏制推力矢量。其余,接洽共青團和少先隊還對準升起進程中品質缺點和關鍵場所缺點惹起的模樣不寧靜題目,提出了一種簡化模子和遏制戰略。
Jet-HR2 的尺寸和涵道電扇擺設。
試驗截止表白,經過遏制足部涵道電扇的推力矢量,不妨靈驗控制呆板人升起時的回旋和俯沖動作。每個電扇不妨供給 5 公斤的推力,所有 20 公斤,所以足以舉起 17 公斤重的呆板人。但這邊的敬仰比并不是很大,這即是遏制的挑撥地方:沒有更多其余的能源,所以須要精心地調配推力。
最后,Jet-HR2 不妨以 1.17(17kg/20kg)的敬仰比勝利實行升起,并維持寧靜模樣(固然不是實足受控),升起莫大勝過 1000 毫米。
Jet-HR2 雙足呆板人的腿部元件。
外表上,創造類人呆板人并不是一件性價比很高的工作,但在某些層面,人形表面完備得天獨厚的上風。正如輿論作家所說:
連年來,百般用來災害相應的人形呆板人貫串面市,經過特意的遏制表面和其余體制來克復不平整的地勢。從保守上去說,類人呆板人不妨經過前進和攀登克復那些妨礙,但那些戰略不足功效,更加是在少許難以克復的妨礙或地質斷層等傷害情況中。對于攙雜實際場景中的重要工作,人形呆板人希望實行更多動靜的空間本領,比方勝過身長數倍的跳高、跳遠、短隔絕遨游、懸停等。

類人呆板人的本能還達不到生人的程度,更加是在分量減少的情景下。另一上面,縱然到達生人程度,呆板人在渙散、易崩裂或絕壁狀的地勢上也大概顯得無助,這猶如是運用純關鍵致動器發力的控制。在這項接洽中,接洽者開拓了一種不妨運用涵道電扇促成體例遨游的新式人形呆板人,以探究其在攙雜情況中探求和救濟的潛伏價格。
不難設想,一臺不妨遨游的人形呆板人,將會有很多潛伏的運用目標。這也等候著更多的接洽者去探究,更多接洽詳細可參考輿論原文。

與吳恩達共話ML將來興盛,2021亞馬遜云高科技華夏高峰會議可「玩」可「學」
2021亞馬遜云高科技華夏高峰會議「第二站」將于9月9日-9月14日全程在線上舉行。對于AI開拓者來說,9月14日舉行的「人為智能和呆板進修高峰會議」最犯得著關心。
當天上晝,亞馬遜云高科技人為智能與呆板進修副總裁Swami Sivasupamanian 碩士與 AI 范圍馳名鴻儒、Landing AI 創辦人吳恩達(Andrew Ng )碩士打開一掣爐邊說話」。
不只如許,「人為智能和呆板進修高峰會議」還樹立了第四次全國代表大會分乒壇,辨別為「呆板進修科學」、「呆板進修的感化」、「無需依附專科常識的呆板進修試驗」和「呆板進修怎樣落地」,從本領道理、本質場景中的運用落地以及對行業范圍的感化等多個上面精細闡明了呆板進修的興盛。