波士頓動力 Spot 剛學會“撒尿”,加州伯克利機器狗已經能導盲了

波士頓動力機器狗 Spot 的能力如何,我們已經領略過了。
我們知道,它可以適應各種崎嶇地形:

表演過齊舞:

也能按下把手開門:
除了這些我們熟知的“低階能力”,今年 Spot 其實也成長了不少,種花、寫字、清潔垃圾、跳大繩都不在話下。
3 月初,SpaceX 星艦原型 SN10 降落發生爆炸后,正是 Spot 奔赴第一線,檢查星艦爆炸情況、評估發動機的損害程度。前不久,Spot 也開始參與法國軍隊的日常訓練,或許未來戰場上將出現 Spot 的身影。
恰巧在昨天,一則關于 Spot 新技能的消息刷屏了:一位名叫 Michael Reeves 的 Youtuber 歷時 6 個月,通過安裝攝像頭、噴嘴萬向節等,給 Spot 增加了一個倒啤酒的新技能。
然鵝,由于最終準確率僅僅 35%,因此場面一度尷尬,Michael Reeves 原本設想的倒酒機器狗竟然變成了撒尿機器狗......
不得不說,在網友的腦洞加持下,Spot 快被“玩壞了”,而這也說明它關注度高、實力不凡。
但值得注意的是,即便是備受關注的網紅機器狗,也要面對不小的競爭壓力。
畢竟,這屆機器狗太強,可以說是無所不能了。
比如走梅花樁:
接受「鐵狗五項」挑戰:

掛上牛頭,和 idol 一起上春晚:

而就在最近,美國加州大學伯克利分校也設計了一只機器狗。
相比被用于軍事用途、被網友惡搞,這只狗子的主要功能顯得有點兒溫情:為視障人士導盲。
剛性驅動臂換成牽引帶
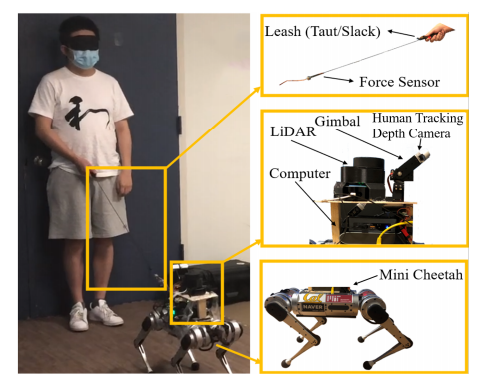
目前,這只導盲犬的相關研究成果可以在預印本平臺 arXiv 上找到,論文題為 Robotic Guide Dog: Leading a Human with Leash-Guided Hypid Physical Interaction(機器導盲犬:用牽引帶引導的混合物理交互為人類導航)。
眾所周知,導盲犬在社會中扮演著至關重要的角色,對特殊群體而言,導盲犬不是工具,而是一位伙伴、是一種保護、是他們與這個世界的連接。
一只表現出色的導盲犬,通常都經過了嚴格的篩選和訓練。但如果用技術的思維來看導盲犬的訓練工作,我們就會意識到一個問題一只狗獲取的技能無法轉移到另一只狗身上,這使得導盲犬訓練既費時又費力,而且過程不容易擴展。
基于此,加州大學伯克利分校研究團隊的目標是設計一個能導盲的機器人。
論文介紹,機器人導盲其實并非什么新鮮事,不過目前看來,大多數導盲機器人系統都是基于帶有大底座的輪式平臺,并帶有可驅動剛性導向臂。

研究團隊認為:
受大底座和驅動臂的限制,傳統的導盲機器人一般都很難在狹窄、混亂的環境中工作。此外,驅動臂也給機械控制設計帶來了額外的復雜性。
研究團隊因此嘗試把傳統的剛性驅動臂換作一條牽引帶。
實際上牽引帶并不是說換就能換,畢竟相比外形相對固定的驅動臂,牽引帶時而緊繃時而松弛,其變化將更為復雜。下圖展示的是牽引帶緊繃和松弛的兩種狀態。
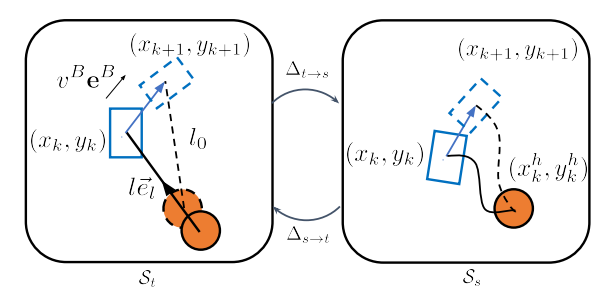
研究團隊提出了一種包含牽引帶張力的混合人-機物理交互模型,用于描述機器人導盲系統的動力學關系。研究團隊將該模型應用于一個混合整數規劃問題中,并建立了一個反應規劃器,它可以利用松-緊開關,引導視障人士在有限空間內安全前行。
規劃器的工作流程具體是:確定當前位置和目標位置后,全局規劃器首先使用算法為局部規劃器生成目標可行路徑點,接著局部規劃器生成一條短的軌跡,再向機器人發送控制命令。
研究團隊設計的框架大致如下圖所示。
由會后空翻的小獵豹“進化”而來
在提出上述機器人框架之后,研究團隊將其部署在一個小型四足機器人身上。
值得關注的是,研究團隊用到的四足機器人是 Mini Cheetah(翻譯過來就是小獵豹)。
ICRA2019 會議期間,來自 MIT 機械工程系、電氣工程與計算機科學系的一組研究人員發表論文,官宣了 Mini Cheetah。
簡單來講,Mini Cheetah 是一種高 0.3m 左右、重 9 kg 的四足機器人,它體積孝功能強大、機械堅固,使用了定制的可反向驅動模塊化驅動器。當時 Mini Cheetah 已經能進行小跑演示,速度高達每秒 2.45 米;還能做出 360° 后空翻的動作。
研究團隊基于 Mini Cheetah 做了這幾點設計:
借助二維激光雷達實現機器人定位;
用深度相機進行人體檢測;
配備先進的速度跟蹤控制器(雷鋒網注:根據給定的速度命令計算出所需地面反應力和位置信息,可以算出關節位置速度,這一信息將傳遞給關節控制器,產生關節力矩)。
最終,Mini Cheetah 成為了一只名副其實的機器導盲犬。
我們來看看效果(下圖中最窄處寬度是 0.8 米)。
無疑,這款能夠帶人類穿過狹窄雜亂空間的自主機器人,對視障人士來說將是一大福音。
未來機器人還將在導盲能力上如何改進,雷鋒網將繼續保持關注。
雷鋒網雷鋒網雷鋒網