工業之美丨全球速度最快的垃圾分揀機器人,每秒分揀100次、準確率95%

記者 | 徐寧
編輯 |
1
未來,國產垃圾分揀將告別手動時代。
日前,廣東弓葉科技有限公司(下稱弓葉科技)的人工智能垃圾分揀機器人PiCKiNG Ai,亮相第二十二屆中國環博會。
據弓葉科技介紹,這款全自主研發的垃圾分揀機器人,能24小時七天不間斷地進行垃圾分揀,分揀速度每分鐘可達90-100次,是目前全球垃圾分揀速度最快的機器人。

人工智能垃圾分揀機器人PiCKiNG Ai。攝影:徐寧
垃圾分揀是減輕城市垃圾處理量的關鍵性環節。對垃圾進行分揀,能提高可回收物純度,降低再生資源的浪費,實現垃圾資源再利用。
傳統的垃圾分揀需要靠人力完成,垃圾處理廠的一線工人往往處于臟亂差的環境中,且工作時間長、勞動強度大。
弓葉科技稱,其研發的高速分揀機器人,通過人工智能算法進行視覺分析訓練,依靠圖像精確識別需要抓取的垃圾,投放到相對應的料框中。
弓葉科技創始人莫卓亞向界面新聞記者表示,其公司識別庫里的圖片數據已經達到了數億級。該款機器人可以從分類后的干垃圾中,揀出可回收的金屬、塑料、紙類等,分揀的精準度在95%以上。
莫卓亞稱,一臺垃圾分揀機器人約可以代替八個工人,且可以將垃圾細分至六到八類,比人力分揀更加細致、準確。
莫卓亞表示,目前該垃圾分揀機器人已實現批量化生產銷售,并應用于全國50多家垃圾工廠。
PiCKiNG Ai正在分揀可回收垃圾。攝影:徐寧
據界面新聞記者了解,目前國內專門從事垃圾分類機器人研發的企業并不算多。
2019年進博會上,ABB曾展示了一款人工智能垃圾分類解決方案,即通過機器人、計算機和傳感器結合的神經網絡技術,使得機器可以像人腦一樣對垃圾進行分類和揀眩
該套解決方案由YuMi雙臂機器人、負責上料的IRB 1200機器人以及視覺系統、人工智能、機器學習等組成。
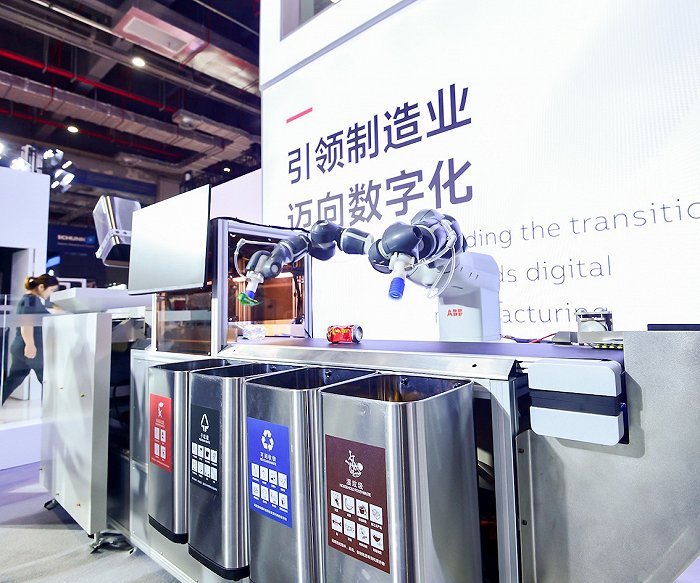
ABB人工智能垃圾分類解決方案。圖片來源:ABB
云端儀表板向YuMi機器人展示垃圾圖像,幫助它識別垃圾類型并將垃圾分別揀選至四類垃圾箱中,然后垃圾會轉移至輸送帶,IRB 1200機器人集取垃圾并將其送入回收利用環節。
去年6月,據浦東發布消息,上海交大中英國際低碳學院李佳副教授,研發出了一款超視覺垃圾分揀機器人。
據李佳介紹,該款機器人由機械手臂、視覺傳感器和中控臺三個部分構成。在視覺傳感器中,該機器人增加了紅外波段范圍,可辨別一些肉眼無法辨別材質的垃圾。

超視覺垃圾分揀機器人。圖片來源:浦東發布
李佳研發的這款超視覺機器人已進入產學研技術推廣階段,計劃與國內環保頭部企業共同開發,以更快進入市場應用。
在國外,同樣采用視覺分析系統進行分揀的,還有芬蘭的Zen Robotics公司。
據機器人網報道,2012年,Zen Robotics公司研發了ZenRobotics回收機,這款回收機利用圖像識別與深度學習來處理垃圾圖像,以每小時3000件的速度全自動分離各種垃圾,可以識別金屬、木材、石膏、石塊、混凝土、硬塑料、紙板等20余種可回收垃圾。

ZenRobotics垃圾分選機器人。圖片來源:Zen Robotics
與視覺分析系統不同的是,美國麻省理工學院(MIT)計算機科學和人工智能實驗室,曾開發了一款通過觸摸的方式區分紙張、金屬和塑料的回收分選機器人Rocycle。
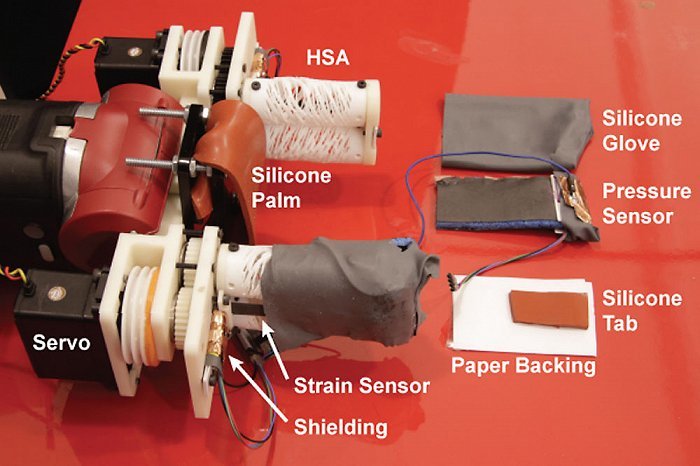
Rocycle外觀。圖片來源:MIT
在分選過程中,這款機器人會對物體進行掃描,并通過傳感器測量物體尺寸。它使用機械手臂上的兩根柔軟手指,擠壓物體以完成抓取,而手指上的壓力傳感器能夠測量抓住物體所需要的力,并以此確定材料剛度。
Rocycle正在進行分眩圖片來源:MIT
最后,將掃描結果與壓力傳感器獲得的數據相互對比匹配,分辨出物體材質后,Rocycle會將物體投入正確的垃圾箱。
弓葉科技成立于2018年9月,總部位于東莞松山湖,是一家切入垃圾分選領域的初創企業。
莫卓亞向界面新聞記者表示,弓葉科技還在研發可以應用于核廢棄物垃圾分揀場景的機器人。未來,核電廠工人所廢棄的防護服、護目鏡等,或可由機器直接分選,無需人工參與,更為安全。